

近年来, 仿生机器人在机器人界得到越来越多的关注
[1-4]
, 而扑翼飞行正是仿生机器人
研究中的焦点之一
[5-7]
. 对扑翼飞行原理的探索不仅具有深刻而广泛的理论价值, 更具有较
高的工程应用价值. 与此同时, 由于扑翼飞行的高效性、灵活性和隐蔽性, 其在地形探索、
目标追踪、军事侦察、生态监测等领域均有广阔应用前景.
由于扑翼飞行的形态学特性, 弹性结构以及其特殊的往复运动模式, 在扑动过程中, 气
体的粘性力和惯性力的作用均不可忽视, 进而造成了多种复杂的非定常气动力学现象
[1, 8-10]
.
具体而言, Ellington 等在文献[11-12]中详细分析了由于前缘涡的存在, 产生失速延时(可以
不失速地大攻角平动)的现象, 阐明了其在提升扑翼升力中所发挥的重要作用, 并在实际实
验中对前缘涡的具体产生和演变过程进行了观测与分析. Dickinson 等在文献[13-14]中强调
了翅翼旋转产生的升力对昆虫飞行的重要作用, 并揭示了其在昆虫机动飞行中所扮演的重
要角色. Weis-Fogh
[15]
在研究丽蚜小蜂的扑翼飞行时发现了著名的拍合−剥离特性(Clap-and-
fling), 他认为在拍合过程中并没有明显的气动力学影响, 但是翅翼拍合保证了翅翼在剥离
之前位置的确定性, 并且指出在剥离过程中在左右翼之间出现绕翼环流, 在完成剥离之后环
流也随即迅速演化成翅翼边缘的稳定涡流, 整个过程均提升了翅翼所产生的升力. Miller 等
[16]
和 Percin 等
[17]
分别研究了翅翼弹性在拍合−剥离过程中的具体作用与影响, 并指出拍合过
程中向下的射流也有助于提升升力. Shyy 等和 Chin 等分别在文献[18]和文献[19]中, 对扑翼
的非定常气动力特性进行了系统总结, 具体包括前缘涡效应、翼面快速旋转、拍合−剥离、
附加质量效应、尾迹捕捉等.
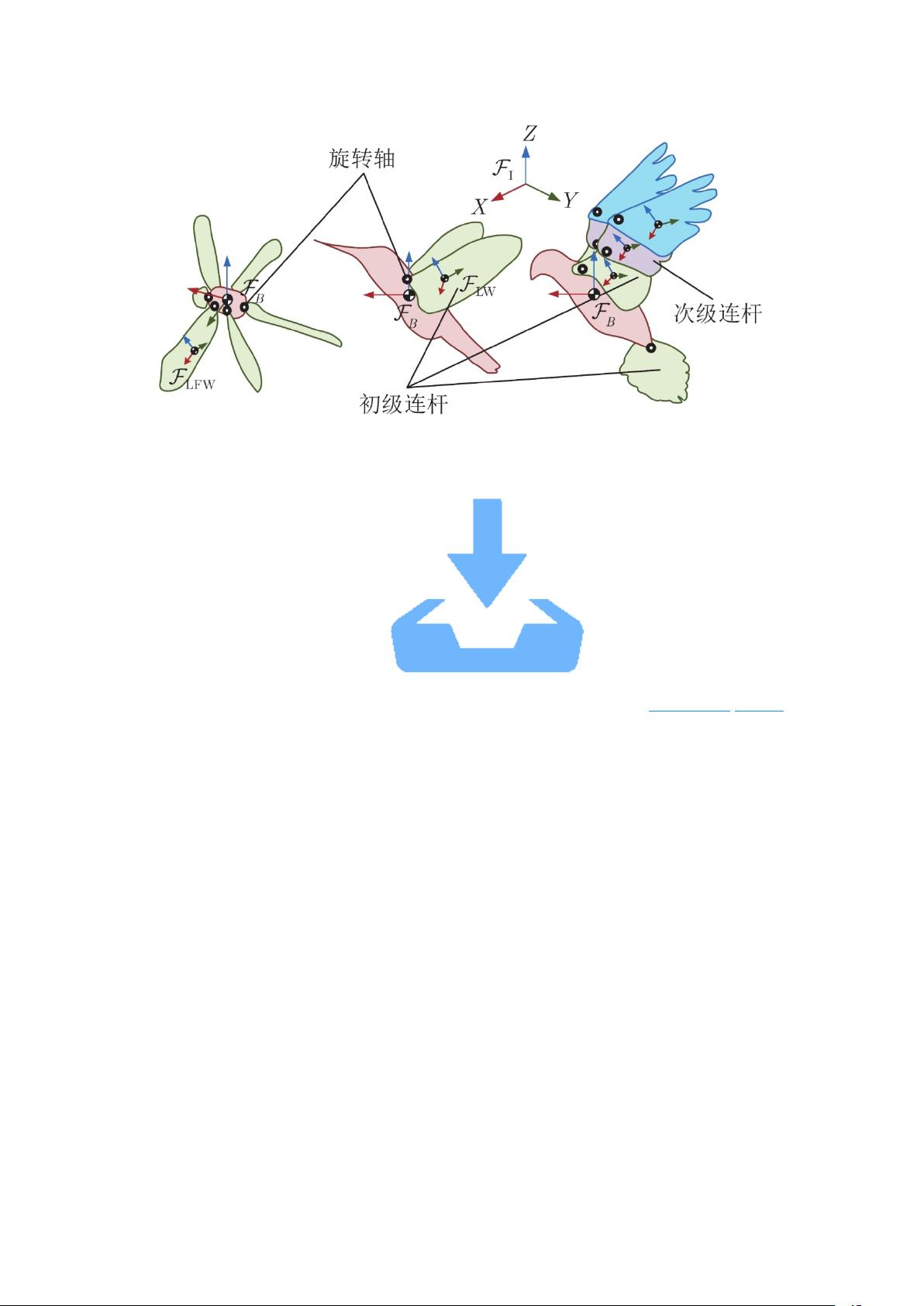
建立扑翼飞行的动力学模型需要对复杂的气动力特性进行必要的简化. 而求解不可压
粘性流体运动对应的纳维−斯托克斯方程非常困难, 建立扑翼空气动力学的准稳态模型, 几
乎是解析分析扑翼系统动力学特性的唯一方式. 根据不同的具体系统特性, 以及模型具体的
应用场景, 可以建立不同的准稳态模型
[14, 19-23]
. 所建立的准稳态扑翼动力学模型, 既可以用
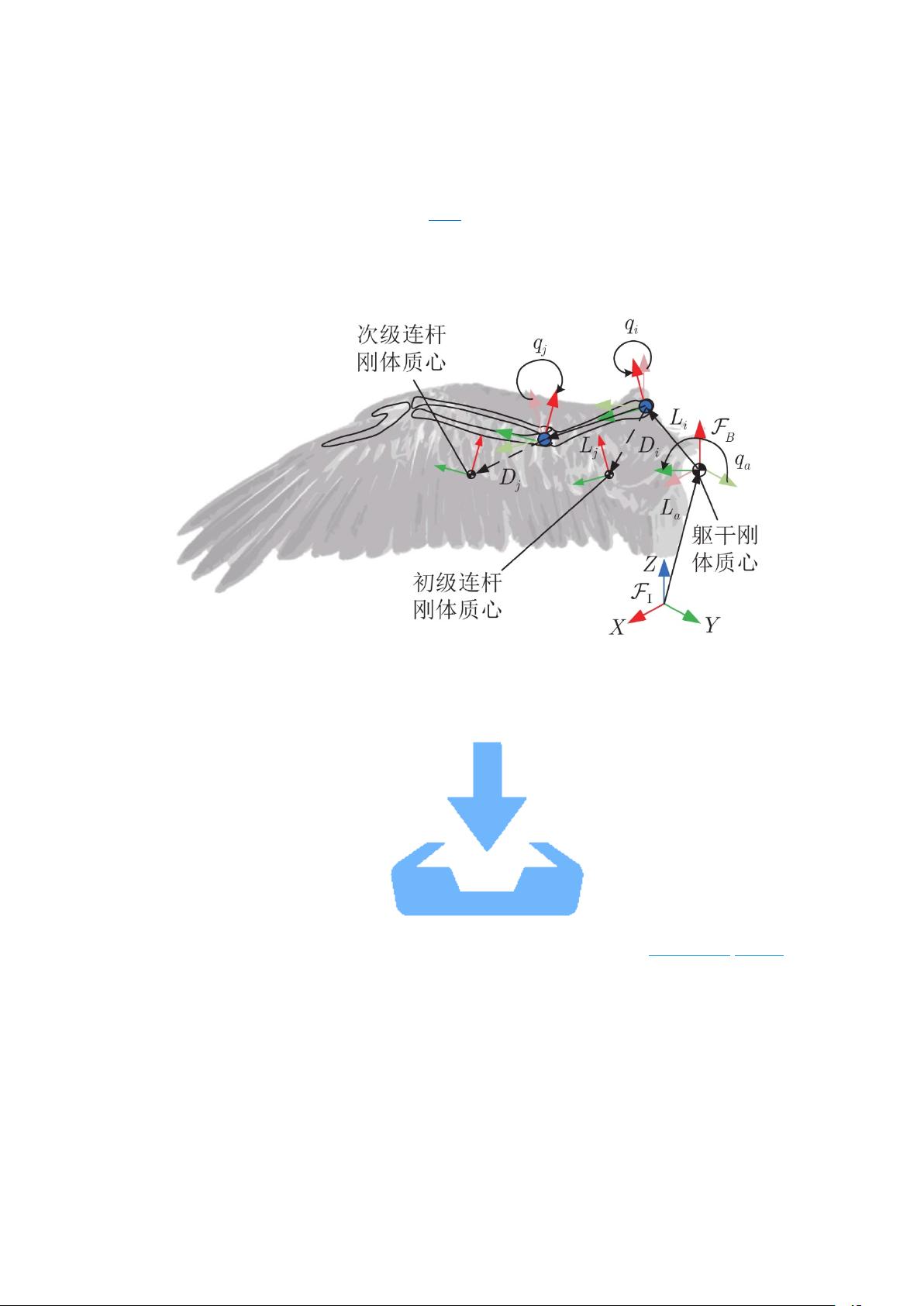
于扑翼动力学系统特性的分析, 也可以用于实际扑翼飞行器的设计与控制. Sun 等在文献
[24-26]中详细分析了昆虫躯干−翅翼的多刚体模型后, 用“刚体假设”简化了翅翼的运动从而
获得机体动力学模型, 并进一步用扑翼周期平均的方法分析了系统的稳定性和能控性. 他们
还将系统在周期解附近线性化, 利用 Floquet 原理分析了系统周期解附近小扰动干扰下的稳
定性. Taha 等在文献[27]中强调了高阶平均化理论在分析扑翼稳定性中的重要性, 但是在系
统简化过程中他们直接用三角函数模拟了翅翼的运动学行为, 忽略了翅翼周期运动的动力
学特性. Cheng 等在文献[28]中考虑了机体运动对翅翼运动学的影响, 并利用气动准稳态模
型进一步建立了三维空间 6 自由度刚体的模型, 且分析了 4 种昆虫的被动稳定性. 在实际的
扑翼飞行器控制中, 作用于机体的力与力矩通常和翅翼的运动学关联, 或者更直接地与决定
翅翼运动的参数相关联. 通过把翅翼步态映射到周期平均力与力矩, 并以 6 自由度刚体运动
模型作为系统模型, 从而设计相应的控制器来完成针对不同环境 或任务的机体姿态、位置
或速度的控制方法
[29-32]
. 其中需要特别指出, Ramezani 等在文献[33-34]中采用拉格朗日方法
对仿蝙蝠扑翼飞行器进行多刚体建模, 并指出扑翼系统的零动态难以确定, 而采用反馈线性
化的方法来设计控制器, 并且分析了闭环系统位置环和姿态环的时标分离.

剩余21页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4558
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- Python 实现TCN-GRU时间卷积门控循环单元多输入单输出回归预测(含模型描述及示例代码)
- 创新流固耦合模拟煤层塌陷模型:基于fipy与pfc2d联合方法的多功能代码干货分享,创新流固耦合模拟煤层塌陷模型:基于fipy与pfc2d联合方法的多功能代码干货分享,该模型是模拟的煤层塌陷的pfc2
- Python 实现GA-RF遗传算法优化随机森林算法多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- 电机模型、PI控制器与PLL锁相环的标幺化处理详解:从理论到实践,采样时间处理全解析,电机模型、PI控制器与PLL锁相环的标幺化处理详解:从理论到实践,采样时间处理全解析,电机标幺化、PI标幺化、锁相
- 基于西门子S7-1200PLC的现代化创新立体车库:传统与未来科技结合的简约程序与仿真图纸及新能源汽车充电解决方案,基于西门子S7-1200PLC的立体车库创新设计:融合新能源汽车充电功能,简约而不简
- Python 实现WOA-BP鲸鱼优化算法优化BP神经网络多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- Python 实现SA-BP模拟退火算法优化BP神经网络多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- HCIP-Datacom题库.zip
- Python 实现GA-ELM遗传算法优化极限学习机多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- MinGW-w64安装指南.pdf
- Python 实现SA-ELM模拟退火算法优化极限学习机多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- numpy-2.2.0-cp311-cp311-win_amd64.whl
- Python 实现DRN深度残差网络多输入分类预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- PFC 5.0 流体与固体相互作用-流固耦合模型实战指南(实用干货版),PFC5.0流固耦合模型应用手册:干货满载的水力压裂与达西渗流常用案例集锦,该模型是“PFC2D流固耦合常用案例合集”: 其中
- Python 实现TSO-SVM金枪鱼群算法优化支持向量机多输入单输出回归预测的详细项目实例(含完整的程序,GUI设计和代码详解)
- Yoast SEO Premium v24.6 – WordPress SEO 插件 全功能版-20250306-134428.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


