基于最优背景估计的星敏感器抗杂散光星点提取方法.docx
版权申诉
154 浏览量
2023-02-23
16:47:53
上传
评论
收藏 367KB DOCX 举报

0. 引 言
作为飞行器姿态控制单元的核心设备之一,星敏感器通过敏感天球上的恒星输出三轴
姿态,具有精度高、自主性强和可靠性高等优点,是飞行器自主航行期间最可靠的设备
[1]
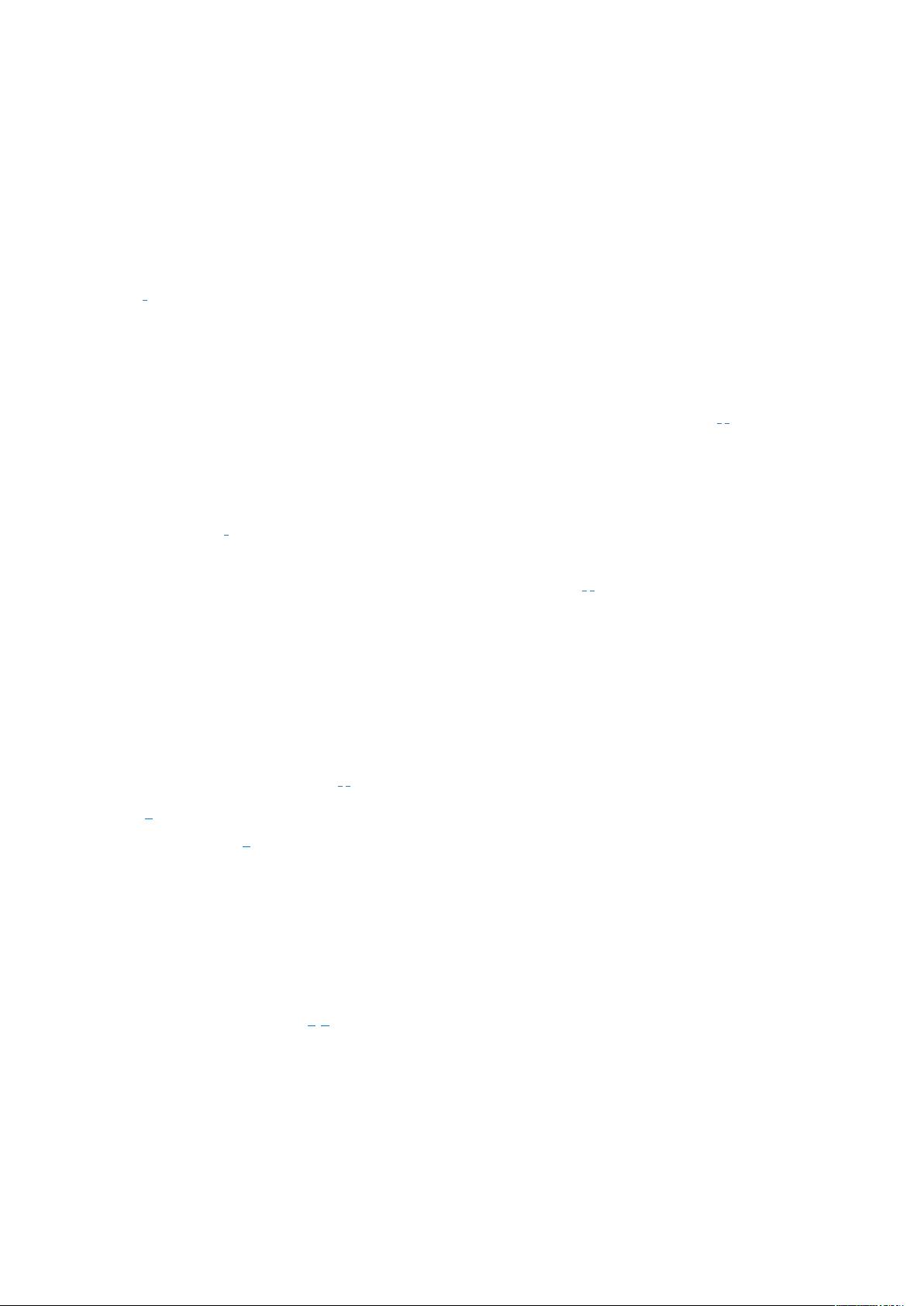
。在星敏感器工作期间,太阳、月光、地气光、空间碎片反射光及测试环境中的光等杂
散光照射进星敏感器,会造成星点提取数目少和星点质心定位精度差等问题,影响姿态解
算结果。为了解决杂散光干扰下星点提取效果差的问题,文中开展了去杂散光干扰的星点
提取研究,提出了基于杂散光最优背景估计的星点提取方法。
目前,星敏感器在抗杂散光技术上主要采用两种方法:遮光罩和抗杂光算法
[2-3]
。遮光
罩是一种可吸收和反射杂散光的挡光设备,这种方法虽然在一定程度上减少了杂散光的影
响,但是不能完全排除杂散光的干扰。抗杂光算法是一类从杂散光图像中提取星点的算
法,具有使用灵活、可移植性强及可面向多种干扰等特点,是目前星敏感器中抗杂光干扰
的研究热点
[4]
。抗杂光星点提取方法可以分为两类:基于杂光背景估计的方法和基于星点
分布的方法。基于杂光背景估计的方法通常先估计出杂光背景然后在残差图像上检测星
点,典型的方法有基于背景滤波的方法和最大背景估计的方法
[5-6]
。前一种方法使用星点区
域的边缘像素来估计星点图像的背景,后一种方法利用目标点附近亮区域像素估计背景。
从构造背景的过程上看这两种方法是将杂散光背景建模成一个平面,然后通过目标附近区
域的像素确定平面的值,这个平面是等值面。在实际中,杂散光在遮光罩内反射会形成多
种形态的面,包括但不限于平面。在使用等值面提取星点时会产生提取星点中包含一定的
杂散光能量或者星点能量被过多去除的情况,这会引起星点质心估计误差增大的情况。基
于星点在图像中表现出的“凸起”特点,研究者提出了利用灰度前向差分方法和数学形态学
等基于星点形状的提取方法
[7-8]
。前者利用了星点和背景在灰度值上的阶跃特征,参考文献
[7]中提出了基于“削顶”特点的提取方法。后者利用星点边缘结构元素进行检测和提取星
点,参考文献[8]提出了一种改进的 top-hat 变换来提取星点。由于杂散光背景的复杂性,同
样的星点在不同的背景下可能会表现出不同的特点。另外,在噪声干扰下,低信噪比星点
的形态特点会表现的不显著。这些会影响这种基于星点形状方法的提取效果。这类基于星
点特征的提取方法更多关注杂散光干扰下得星点检测问题,对星点质心估计的准确研究较
少。
针对杂散光干扰下星点提取问题,文中提出了一种基于最优背景估计的抗杂散光星点
提取方法,和参考文献[5-6]不同的是文中将杂散光成像建模成曲面。文中首先根据杂散光
在星敏感器中的成像特点,构建了杂散光的曲面成像模型,然后提出了利用邻域像素估计
杂散光最优背景的方法和星点提取方法。最后构建了仿真和实物实验,对比和分析了算法
的性能。
1. 杂散光背景建模

剩余13页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3663
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- SVID_20240523_141155_1.mp4
- Code for the complete guide to tkinter tutorial
- 关于百货中心供应链管理系统.zip
- SimpleFolderIcon-master 修改Unity的Project下的文件夹图标
- A python Tkinter widget to display tile based maps
- A pure Python library for adding tables to a Tkinter application
- Vector资源文件.zip
- MobaXterm-Installer
- MicroMsg.xlsx
- 88-520告白(520气球).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


