基于时空推理网络的空中红外目标抗干扰识别算法.docx
版权申诉
185 浏览量
2023-02-23
16:47:49
上传
评论
收藏 358KB DOCX 举报


0. 引 言
红外空空导弹是近距空战格斗中最为有效的杀伤武器之一
[1]
,为对抗其强大的杀伤
性,各种新型干扰手段成为研究的重中之重,同时也使得空战环境日益复杂。随着点源、
面源等诱饵弹的使用,载机通过投放诱饵弹干扰红外成像导引头的目标鉴别能力。在实际
空战对抗中,目标在机动过程中连续投放大量人工诱饵弹,目标与诱饵弹干扰特征信息相
近,导致视场中出现多个疑似目标,在这个过程中,目标和干扰都在发生剧烈变化,导致
红外成像导引头自动目标识别面临相当大的困境
[2-3]
。因此,如何提高抗复杂场景中红外诱
饵干扰的能力是当前红外空空导弹面临的核心问题,具备抗人工诱饵弹干扰能力对于红外
制导系统具有重要意义。
传统的红外目标识别算法大多是通过特征提取模板匹配进行设计验证。典型的特征包
括形状、局部纹理、边缘特征等
[4-6]
。早期,人们选用单一特征表述目标,随着背景条件变
得复杂以及红外诱饵弹的干扰,单一特征已不能满足目标识别性能。因此,人们将多个特
征进行融合处理,实现对目标的互补描述,提高识别精度。但是,随着战场环境的复杂多
变以及诱饵弹干扰的投放,特征实时变化加快,融合权重不能满足特征快速的实时变化,
用简单的权重融合也不能表征特征之间复杂的变化关系和连续帧之间的特征随时间的变化
规律,造成目标识别率低。
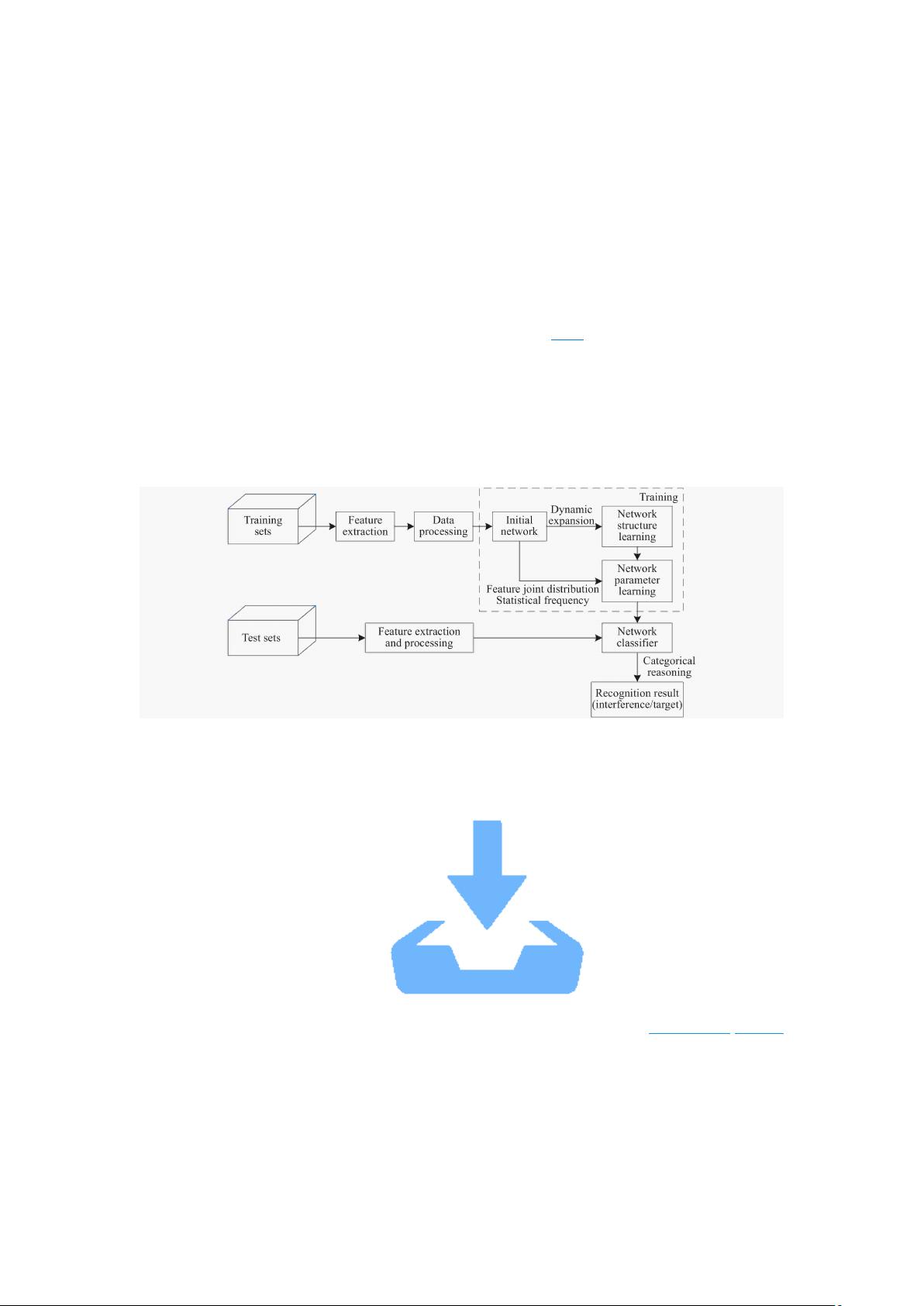
针对上述问题,文中提出基于动态贝叶斯网络的时空关联推理网络。时空关联推理网
络引入对特征变量时空约束的先验知识,通过特征变量间的约束及特征变量在时序上的演
化对目标识别进行概率推理建模。该方法充分考虑了不同时刻相同特征间的约束关系,构
建的时空关联推理网络结构更符合人类视觉目标识别推理情况,并且提高了目标识别的稳
定性。
1. 相关工作
传统的模板匹配目标识别算法是通过预先设定目标模板,然后使用目标模板在待检测
图像中滑动寻找最佳的匹配位置,将相似度大于设定阈值的图像认定为目标
[4-6]
。E.
Elboher
[7]
等提出了一种基于不对称相关性(ASC)的高效且鲁棒的模板匹配方法,该算法
在线性时间内执行预测步骤,然后针对几个有希望的候选窗口计算 DFT,既能够处理部分
遮挡和空间变化的光线变化,又具有较强的鲁棒性。H Yang
[8]
等提出了一种新的自适应径
向环码直方图(ARRCH)图像描述子,该描述子使用径向梯度码作为旋转不变特征。该方
法利用由粗到细的策略来处理大规模变化,具有更强的抗大尺度和旋转差的能力。模板匹
配虽然操作简单易于实现,但是对于模板的要求比较严苛,简单的模板不能适应复杂的空
战环境。基于支持向量机
[9-12]
的目标识别算法是一种基于统计学习理论和以结构风险最小为


剩余15页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3691
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











