基于高频方波电压注入法和改进龙伯格观测器的永磁同步电机转速估计的研究.docx
版权申诉
108 浏览量
2022-12-15
14:24:06
上传
评论
收藏 541KB DOCX 举报


1 引言
永 磁 同 步 电 动 机 (Permanent magnet synchronous motor,PMSM)由 于 其
高效率、高功率密度和无直流磁场等优点,近年来被广泛应用于交流传动领域
[1]
。特别是随着高精度伺服控制和电动汽车领域的高速发展,对永磁同步电机的
磁场定向控制提出了更高的要求。矢量控制的核心是如何获得精确的转子位置
和转速。目前已有许多无传感器技术用于估计转子的位置和速度。
多年前,基于高频正弦信号注入的无位置传感器控制方法开辟了永磁同步
电机无位置传感器控制的新领域
[2,3,4]
。在零频或低频情况下,转子的位置可以通
过注入旋转高频电压或脉动高频电压,并使用跟踪算法或外差法获得
[5]
。但是当
采用旋转或脉动的高频电压注入方法时,需要使用低通滤波器(Low pass filter,
LPF)I
f
来获得误差信号,这些低通滤波器由于其固有的时延而降低了无位置传
感器的控制性能
[6]
。近十年来,基于方波信号注入的方法得到了发展,该方法不需
要 LPFs,而是通常使用一个龙伯格位置观测器来收敛估计误差,将电流控制器
的带宽提高到 250 Hz,速度控制器的带宽提高到 50 Hz
[7]
。通常,龙伯格位置观
测器采用电磁转矩前馈来提高转子位置跟踪性能。通过仿真试验,研究发现观
测器的稳定性取决于负载转矩的预测精度,当负载扰动频繁变化时,传统的方法
无法快速跟踪转子位置
[8]
。
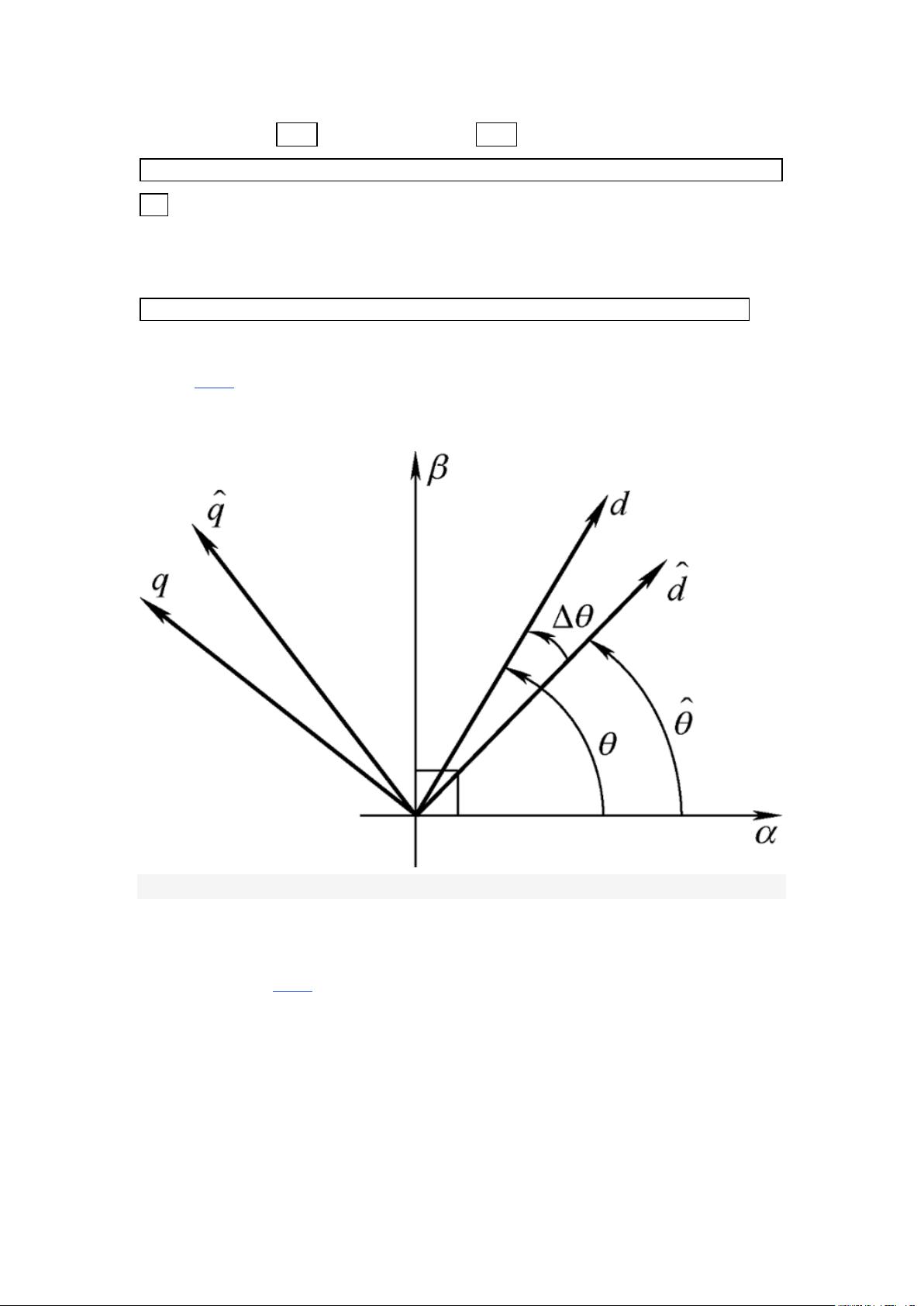
基于以上研究成果和存在的问题,本文对龙伯格位置观测器进行了改进。
首先,分析了永磁同步电机的矢量控制和方波高频电压注入法的原理
[9]
;然后,利
用矢量控制中的速度指令构造了一个新的二阶系统。作为一个新的前馈控制参
数,前馈项不再受负载的影响。仿真结果表明,改进的转子位置观测器在负载扰
动下具有较好的性能。
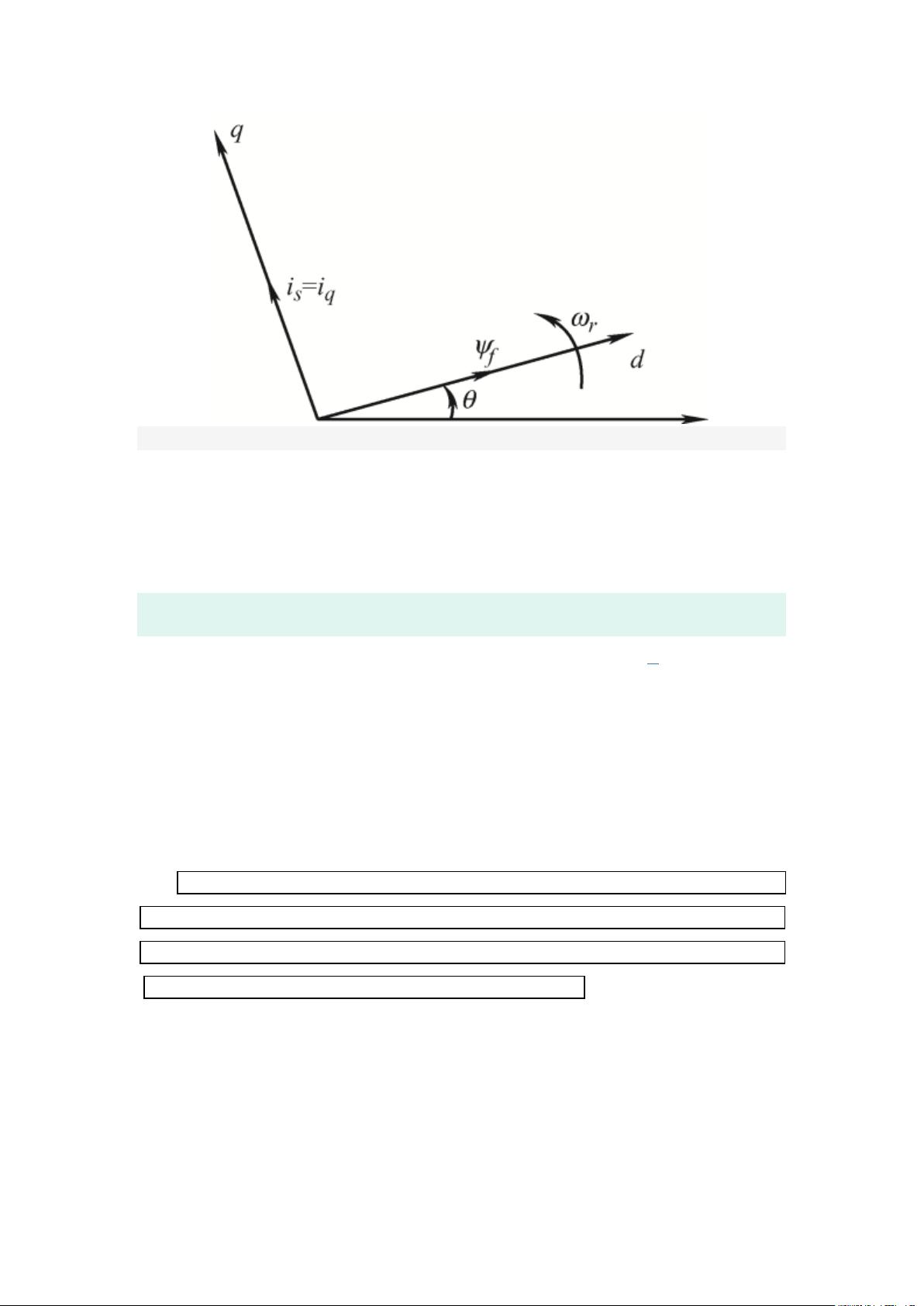
2 永磁同步电机矢量控制系统
矢量控制(Field-oriented control,FOC)采用空间矢量表示定子电流。它将
三相定子电流(A, B, C)转换为两相时变系统(α, β)。从该时变系统通过旋转变
换得到一个双坐标时不变系统(d, q)。这两个组成部分相互垂直,相互独立。这
样,它们可以分开调节,类似于直流电机的双闭环控制系统。
永磁同步电机在电源频率和实际转子坐标系(d-q 坐标系)下的电压方程的
矩阵形式为

剩余15页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3549
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











