
精确制导武器远程化的发展对导航提出了更高要求。GPS 与 INS 的组合技术,充分利
用了 GPS 与 INS 各自的优点,当 GPS 遭受信号干扰时,系统可通过 INS 来自主维持导航
精度;当 GPS 恢复可用,系统则将 GPS/INS 的输出通过卡尔曼滤波得出最优误差估计,
反馈回 INS 进行累积误差校正,从而在达到抗干扰目的的同时,获得更好的导航性能,因
此,被精确制导武器广泛采用
[1]
。GPS/INS 的组合导航方式主要有松耦合、紧耦合和超紧
耦合 3 种,在超紧耦合方式中,GPS 与 INS 的组合发生在 GPS 的跟踪环部分,相对于松耦
合和紧耦合方式而言,它彻底改变了传统 GPS 跟踪环的设计结构
[2]
,大大提升了 GPS 接收
机的抗干扰性能。
当前,针对 GPS 的导航对抗已成为现代战争中夺取制信息权的关键。对采用
GPS/INS 超紧耦合的精确制导武器实施导航对抗,要通过干扰源的合理设置和高效配置来
确保对目标 GPS 接收机在运行轨迹上的连续压制,造成 INS 因长时未获得 GPS 修正而产
生足够大的累积误差,从而满足对己方重点区域或重要设施的防护需求。
对 GPS/INS 超紧耦合下干扰源威力区的精确解算是干扰源合理设置和高效配置的关
键。文献[3-6]简单以扩频增益作为 GPS 接收机的抗干扰容限,未考虑接收机抗干扰措施对
接收信号处理的影响,因此所得结论不具有借鉴性。文献[7-9]对 GPS/INS 超紧耦合下的
GPS 接收机跟踪环路抗干扰性能进行了分析,但将干扰对载波环和码环的影响等同处理,
而实际上干扰对两个环路的影响机理是有区别的。文献[10-13]以码跟踪误差或干扰等效载
噪比为依据,分析了干扰源空间位置对干扰功率与干扰距离关系的影响,但单纯以码跟踪
误差或干扰等效载噪比来度量干扰效果过于片面,对干扰战术运用的指导意义有限。
本文在考虑精确制导武器采用 GPS/INS 超紧耦合的情况下,以对 GPS 接收机造成的
不同干扰效果来划分干扰威力区,解算得到不同威力区所对应的干扰距离与干扰功率的关
系;结合对所干扰目标连续压制作用距离的分析及所需干扰源数量和部署位置进行建模计
算,确保了干扰源的合理设置和高效配置。
1. 干扰威力区分析
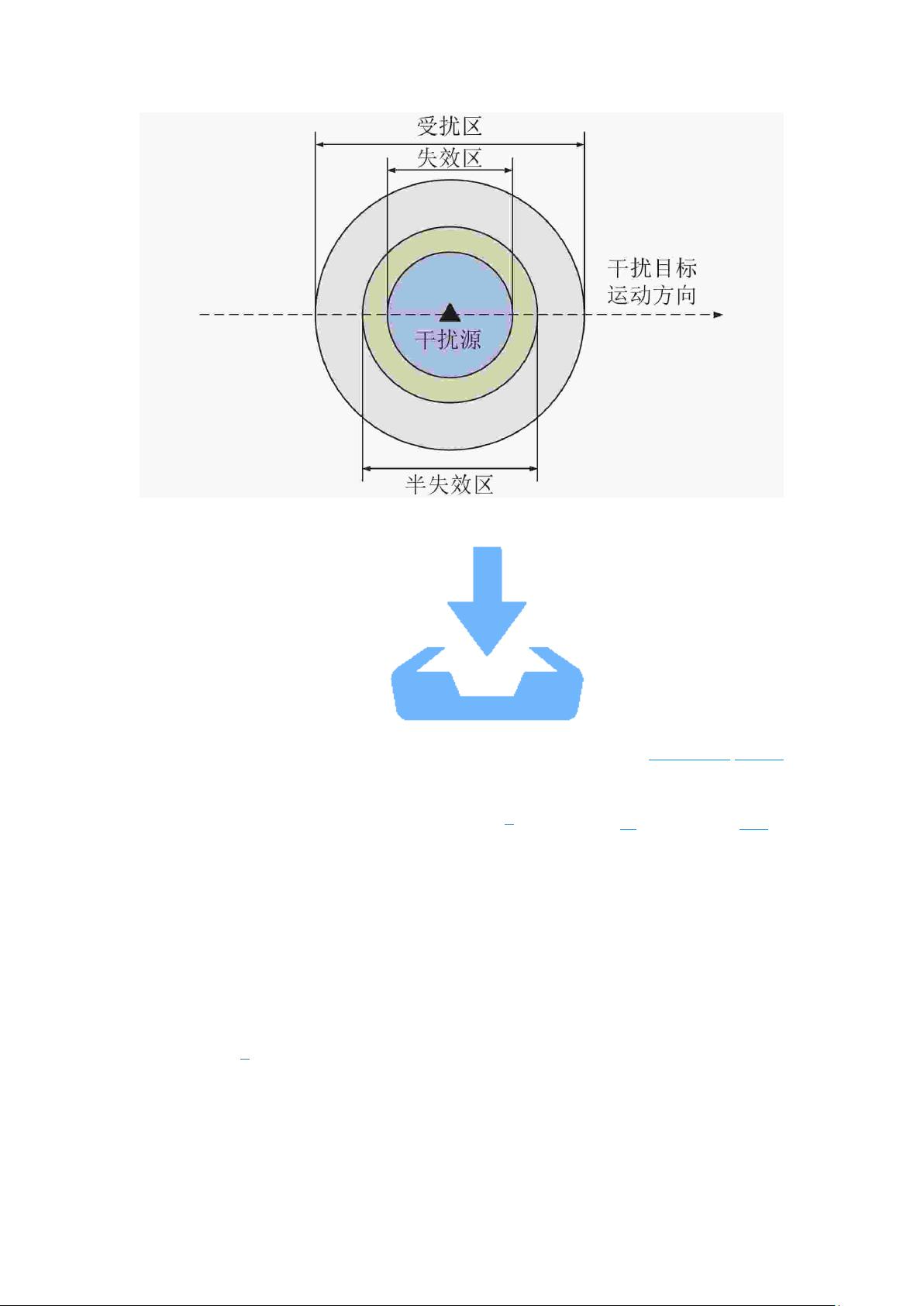
根据对压制干扰下 GPS 接收机不同干扰效果评估指标的分析,采用跟踪环失锁、定
位误差增大和平均捕获时间延长来对干扰威力区进行划分,具体如图 1 所示。

剩余10页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4558
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 车路协同C-V2X在矿山无人矿卡的应用分析
- Java基础教程之环境搭建
- 欧姆龙CP1H+CIF11与3台欧姆龙E5CC温控通讯程序:通过昆仑通态触摸屏,实现稳定可靠的温度控制与报警功能,欧姆龙CP1H+CIF11与三台E5CC温控器的通讯程序:昆仑通态触摸屏实现设定温度、
- STLinkUSBDriver.dll
- 基于V-REP与MATLAB联合仿真的小车项目:循迹、避障、走迷宫及路径规划的详细代码与文档说明匹配版,基于V-REP与MATLAB联合仿真的小车项目:循迹、避障、走迷宫与路径规划的详细代码与文档说明
- Dify,Echarts渲染样例文件
- Java基础教程之基础语法
- 西门子S7-200 Smart PLC控制三菱E740变频器通讯程序详解:实现以太网与Modbus RTU通讯的稳定性与可靠性提升方案,西门子s7 200smart与三菱E740变频器通讯程序设计与设
- Axure RP 9,自用上传备份
- 风电机组联合仿真模型,OpenFast与SimLink联合仿真模型下的风电机组独立与统一变桨控制策略研究,openfast与simlink联合仿真模型,风电机组独立变桨控制与统一变桨控制 独立变桨控
- 2025年DeepSeeK开启AI算法变革元年
- gradle-7.4.2.zip资源下载
- Java基础教程之数据类型
- 电子工程_手机充电器_毕业设计_教学辅助_1741161627.zip
- 财务成本模型.pptx
- 2024 金融机构数据安全合规建设调查研究报告.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


