
1. 引言
针对当前普及应用的固定单目相机构成的交通监控系统,基于视频的交通参数和事件
检测、行为分析和安全预警已成为智能交通领域的研究热点
[1]
.目前采用大量的独特的算法
[2-11]
实现对车辆有效检测和跟踪.现有算法中的对称特征检测都是建立在目标车辆的精确分
割基础之上的,然而从复杂的交通背景中精确地分割出跟踪目标有着较大的难度.而传统的
以底层特征为基础的分割方法在实际应用过程中往往很难取得理想的效果.因此,本文提出
一种基于对称 FAST 特征的车辆目标检测方法.该方法利用局部特征的集合来描述车辆目
标,在提取车辆的 FAST 特征点基础上,构造 FAST 特征描述算子,结合最近邻搜索算
法,提取具有对称特性的 FAST 特征点对,并在后续的聚类分析的过程中选择对称性作为
核心特征,以此为基础确定车辆中心线.最后,按照车辆底部阴影形态实现对目标车辆的跟
踪和检测.
2. 对称特征提取
2.1 FAST 特征点提取
在本研究中,为了进一步提升特征点的检测效率,目标的局部特征采用 FAST 特征
点.Rosten 等在文献[12]中首次给出了 FAST 角点的定义:如果某像素与其周围邻域内足够
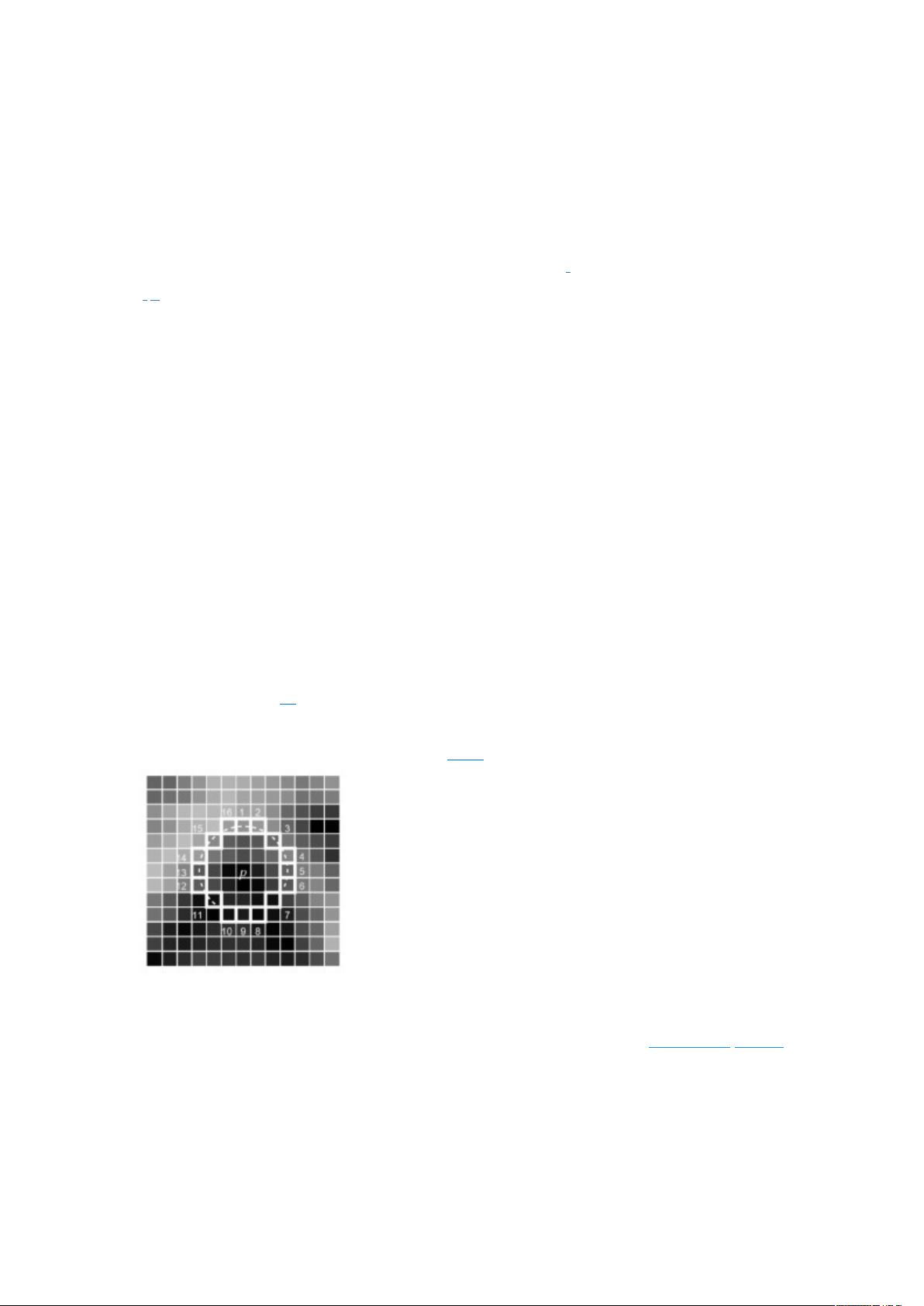
多的像素点相差较大,则该像素,那么该点就有可能是图像的角点.通常其邻域选取周长为
16 个像素点(半径为 3 的 Bresenham 圆),如图 1 所示.
图 1 FAST 特征点检测原理
下载: 全尺寸图片 幻灯片
FAST 特征点检测步骤为:
(1) 对阈值 T 加以定义,计算中心像素点 p 和周围像素点 p1、p9 的像素差,若|p-p1|
<T 且|p-p2|<T,那么可以确定 p 非特征点;反之则将该点纳入候选集合;
资源评论


罗伯特之技术屋
- 粉丝: 4502
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于ssm的教务信息平台的设计与实现源码(java毕业设计完整源码+LW).zip
- 独家BKA-Transformer-LSTM多变量时序预测 Matlab代码 基于黑翅鸢优化算法(BKA)优化Transformer结合长短期记忆神经网络(LSTM)的数据回归预测(可以更为分类
- 松江飞繁消防图形显示CRT
- 城市闲人主题的BLOG网页模板下载.zip
- 城市生活主题的BLOG网页模板下载.zip
- 城市印象风格的商务企业网站模板下载.zip
- 城市效率效果的商务企业网站模板下载.zip
- 城市夜景简单的BLOG网页模板下载.zip
- 程序员博客网站简洁风格的模板下载.zip
- 程序员个人简历实用的网页模板html下载.rar
- 程序软件公司简洁宽屏的模板下载.rar
- 橙黑色欧美风养生美容休闲企业网站模板下载.zip
- 橙黄结合的博客网页模板下载.zip
- 橙黄简洁干净的博客网页模板下载.zip
- 橙黄色的工业设计官方企业整站模板下载.zip
- 橙灰色大气的船舶钢铁制造厂企业网站模板下载.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


