一种基于阴影检测的视频SAR运动目标检测方法.docx
版权申诉
103 浏览量
2022-12-01
09:09:50
上传
评论
收藏 837KB DOCX 举报


1. 引言
视频合成孔径雷达(Synthetic Aperture Radar, SAR)在成像上,既继承了传统 SAR 全天
时、全天候优势,还可以对地面目标区域连续成像,实时获取目标区域的丰富动态信息,
是一种能实现高帧率成像的 SAR 系统
[1]
.视频 SAR 可以对车辆、船舶等高价值目标进行持
续监测
[2]
,并且因其能够获取监测区域丰富的动态信息,在对运动目标的检测和跟踪上相
较于传统 SAR 系统具有巨大优势
[3]
.
检测和跟踪区域内的运动目标或其他动态变化是视频 SAR 的主要任务,而运动目标
检测方法是完成该任务的关键技术.视频 SAR 要实现良好的监测效果,需要较高的成像帧
率,而为保证提高成像帧率的同时不影响雷达作用距离和方位分辨率,往往选择提高雷达
载频
[4]
,或者引入重叠子孔径成像处理技术
[5]
.这使得视频 SAR 具有极高的工作频率,导致
成像时目标回波的多普勒调制对目标运动极为敏感,目标像会因为目标的运动发生偏移和
散焦而不能完整成像.同时运动目标的遮挡使得相应地面散射点在合成孔径时间内产生相干
积累损失,最终成像结果的相应位置处会形成阴影
[6]
.因此,可以根据运动目标阴影来实现
视频 SAR 运动目标检测.Zhao 等人
[7]
提出了一种鲁棒的阴影跟踪算法,并使用阴影辅助信
息来提高 SAR-GMTI 的系统性能.Wang 等人
[8]
分析了目标阴影特征与目标大小、目标速度
以及雷达波束入射角的关系,将视频 SAR 图像序列配准后进行背景建模,用待检测图除以
背景图得比率图后使用 CFAR 来对阴影进行检测,并使用聚类减少噪声和背景杂波带来的
虚警.该方法检测性能受限于背景建模的精度,且由于运动目标阴影和背景的强度差异较
小,容易出现漏警,另外也难以区分静止目标和运动目标的阴影,需要加入卡尔曼滤波器
对目标进行跟踪以进一步降低虚警.张营等人
[9]
对视频 SAR 图像序列进行配准、降噪后,使
用阈值分割得到二值图像,对二值图像进行背景建模,然后结合背景差分法和三帧间差分
法来得到检测结果,经真实数据验证能达到良好检测效果.该方法对二值图像进行背景建模
能够一定程度上减少背景干扰项,但由于二值图像损失细节严重,难以降低非运动区域的
虚警干扰,且三帧间差分法
[10]
对于目标运动速度较为敏感,当车速在连续帧间发生微小变
化时,同一实验参数下的检测性能也存在发生较大差异的风险,难以满足实际检测需求.
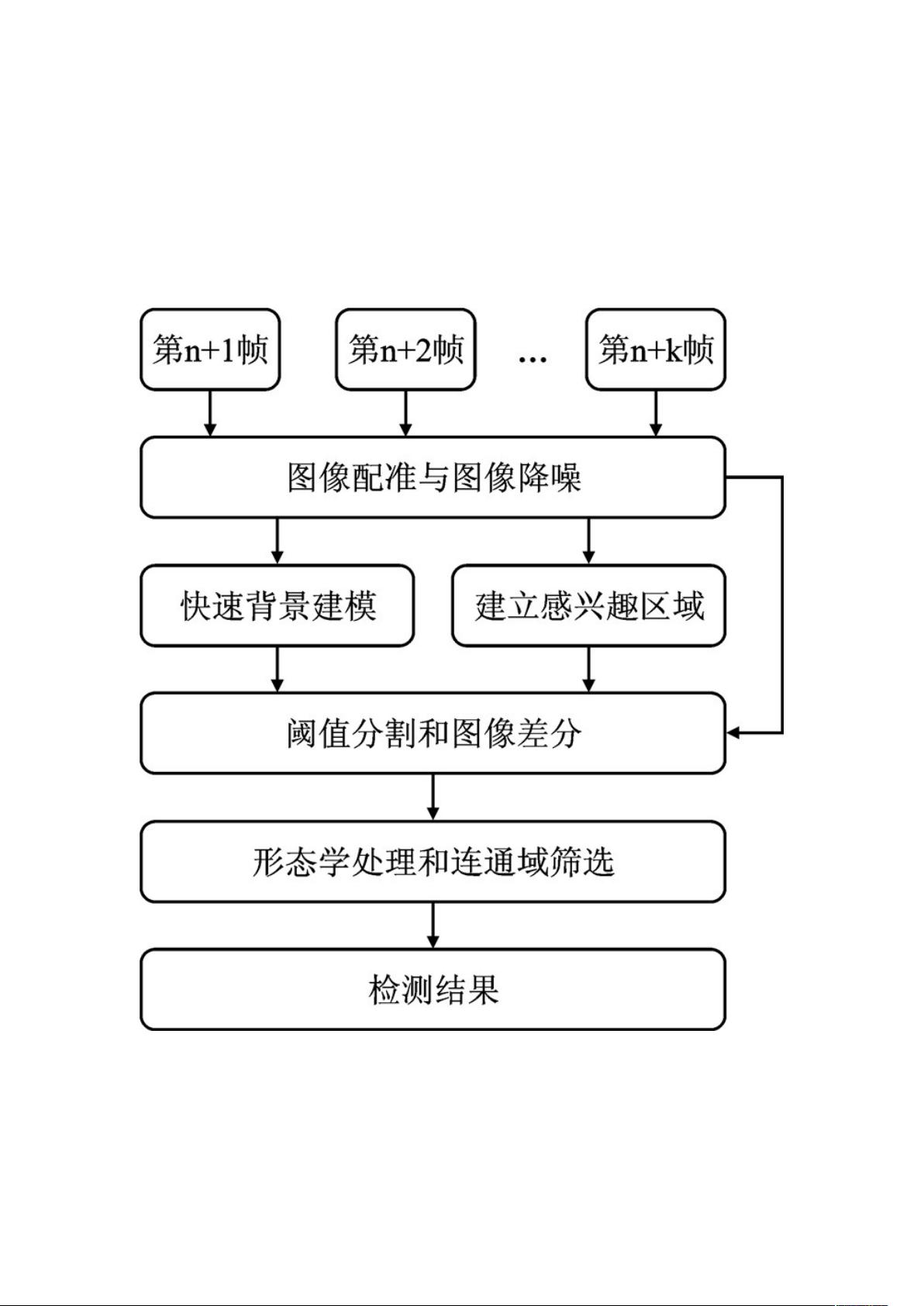
针对上述问题,本文在基于阴影检测的思想之上,提出了一种视频 SAR 运动目标检
测算法.
2. 算法原理
2.1 图像配准与降噪
视频 SAR 的雷达载体平台运动轨迹多为曲线,生成的图像序列间存在一定的旋转、
缩放、偏移,可采取基于特征的配准方法
[11]
以待检测的图像为基准,对图像序列进行配准.

剩余11页未读,继续阅读

罗伯特之技术屋
- 粉丝: 3541
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP


相关推荐
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0
最新资源