基于改进Zernike矩和均值漂移的插针位置检测方法.docx
版权申诉
135 浏览量
2022-12-15
14:16:27
上传
评论
收藏 592KB DOCX 举报


电子接插件作为可分离式元件在电子系统中起着至关重要的作用
[1]
,是电子系统中信
号与功率的重要载体,必须对装配前的电子接插件进行严格的质量检测。视觉检测作为一
种非接触式的自动检测技术,具有高精度、高效率的优点,在汽车电子工业的自动检测领
域得到了广泛应用
[2]
。
接插件的插针图像是基于阵列椭圆的灰度图像,椭圆中心作为期望的金属插针的位置
特征点
[3]
,直接影响插针位置度的检测精度。目前,常用的圆形特征点定位方法包括灰度
质心法、Hough 变换法
[4]
、模板匹配法、边缘检测法
[5]
等像素级检测方法。Georgescu 等
[6]
使
用二阶 Riesz 分数导数推广了一些经典的边缘检测器,利用分数微分法的优势克服了
Robert、Prewitt 和 Sobel 等传统算子的缺点。传统的像素级检测方法已经难以适应如今工
业上高精度的检测要求。因此,针对亚像素边缘检测算法的研究被广泛关注。亚像素边缘
检测原理是通过对边缘附近的像素进行细分来实现精确的边缘定位。常用的亚像素边缘检
测方法有插值法、拟合法和矩方法。其中,插值法相对简单,但易受噪声的影响;拟合法
可以获得更好的边缘,但计算量相对较大,所需的模型也更加复杂;矩方法相比插值法和
拟合法具有较好的抗噪性和高效性,被广泛应用于高精度检测系统
[7]
。Tabatabai 等
[8]
采用三
阶灰度矩的边缘检测方法,实现了亚像素检测精度,该方法以闭合形式提供边缘位置,且
无需插值或迭代,不受加性和乘性灰度变化的影响。Lyvers 等
[9]
提出一种基于空间矩的方
法,利用空间矩和边缘阶跃参数确定边缘位置。虽然文献[8-9]的方法具有较高的精度,但
计算量太大,只适合信息量小的图像。Ghosal 等
[10]
提出一种基于 Zernike 正交矩的亚像素
定位算法,仅需 3 个 Zernike 矩便可获得边缘相关参数,能以较低的计算量获得较高的精
度,但该算法在判断边缘时需要通过人工调整来选择阈值,不仅效率低下,且容易误判,
严重影响检测的精度。Peng 等
[11]
提出一种新的基于边缘梯度方向插值和 Zernike 正交矩的
子像素边缘检测方法,大大提高了边缘检测的精度,在图像中存在复杂边缘时,避免了边
缘干扰。Liu 等
[12]
针对边缘检测的快速、高精度要求,提出一种快速亚像素边缘检测方
法,利用 Otsu 阈值进行背景分割,并使用 Zernike 矩计算边缘点的梯度方向。张晓林等
[13]
利用被测物的几何信息,只使用零阶矩实现了对边缘的亚像素定位,大幅减少了运算量。
Duan 等
[14]
提出了一种基于高斯积分模型的亚像素边缘检测算法。这些改进的检测算法主要
集中在亚像素边缘检测,却未保留传统像素级边缘检测的速度快和计算复杂度低的优点。
为此,提出一种基于改进的 Zernike 矩边缘检测方法,结合均值漂移以实现插针位置度的
亚像素检测。
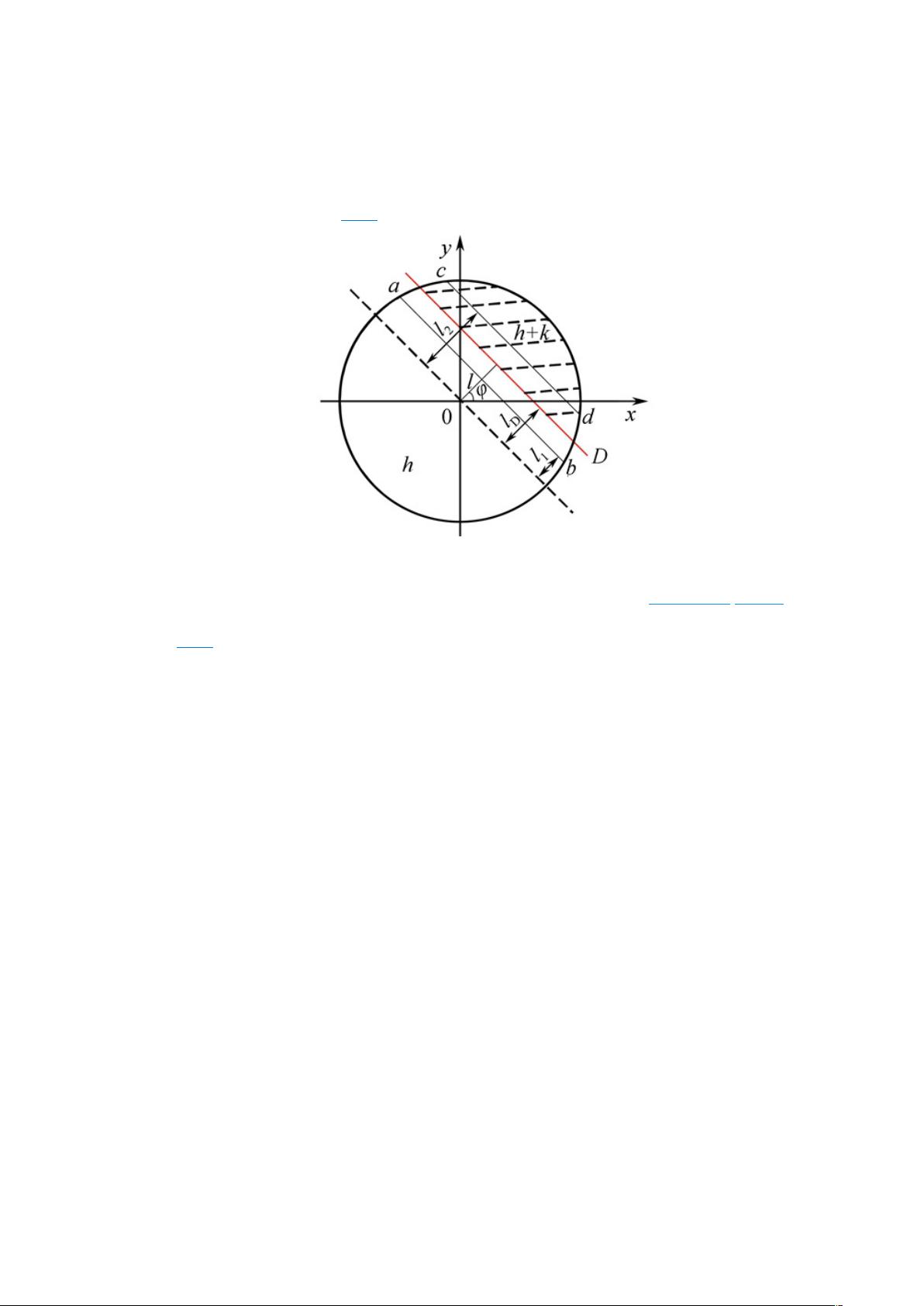
1. Zernike 矩边缘检测原理
Zernike 矩是一种复正交矩阵,其核心是在极坐标空间中定义在单位圆(x
2
+y
2
=1)内的一
组由复多项式表示的完全正交基。图像 f(x, y)的 n 阶 m 次 Zernike 矩可定义为
Anm=(n+1)π∬x2+y2⩽1f(x,y)Vnm∗(ρ,θ)dx dy,
(1)
其中:V
nm
*
(ρ, θ)为积分核函数;m 和 n 为整数,且满足 n≥0,n≥m,n- m 为偶数。
剩余11页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4036
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- ROS导航机器人搭建教程
- 操作系统资源浅显易懂哈哈哈
- 小程序版python语言pytorch框架的图像分类墙体颜色识别-不含数据集图片-含逐行注释和说明文档.zip
- 小程序版深度学习CNN训练识别蔬菜-不含数据集图片-含逐行注释和说明文档.zip
- 小程序版通过CNN训练识别蔬菜-不含数据集图片-含逐行注释和说明文档.zip
- 小程序版基于深度学习识别花卉-不含数据集图片-含逐行注释和说明文档.zip
- 小程序版python语言pytorch框架训练识别非机动车辆-不含数据集图片-含逐行注释和说明文档.zip
- 驱动多路舵机51单片机源程序代码
- 小程序版python语言pytorch框架训练识别猴子种类-不含数据集图片-含逐行注释和说明文档.zip
- c++语言调用matlab画图源程序
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


