

0 引言
模型预测控制(model predictive control,MPC)因其对模型要求低,鲁棒性强,抗干扰性强等特点,
目前已广泛地应用于过程控制领域中
[1-7]
.在 MPC 设计中,随着被控系统愈发的复杂化,其中经常存在着
模型不确定性、输入输出干扰、时间滞后等元素,使得系统闭环分析变得尤为困难.由于许多工业控制过
程可以通过 1 阶加滞后(first order plus dead time,FOPDT)模型来描述,因此可以利用该模型来分析
MPC 闭环性能并推导有效的参数调优公式
[8-10]
.传统的 MPC 调优参数包括预测时域、控制时域和代价函
数中的权重矩阵,这些参数显著影响系统的闭环性能、稳定性及鲁棒性
[11-12]
.对于多变量系统,由于其输
入输出之间存在着复杂的耦合关系,参数调优变得更为复杂
[13]
.现有工业应用中的参数调优方法更多的是
基于工程经验或是数值方法,大大增加了参数设计的盲目性,同时耗费时间多,计算成本也大
[14]
.另外,
利用数值方法得到的数值结果也并不适用于闭环研究,因此基于解析法来研究多变量系统预测控制参数调
优方法有着重要的意义.
文[15]采用凸优化方法对多变量 MPC 权重矩阵与预测步长进行调优来实现所需闭环性能.文[16]基于
多变量系统提出了一种具有一定鲁棒性的无偏差 MPC 参数调优方法.文[17]针对单变量 FOPDT 模型的
MPC,提出一种在无有效约束条件下的解析参数调优方法;文[18]在此基础上提出了针对变多量系统的解
析参数调优方法.需要强调的是,对于一些滞后为分数阶的系统,由于当系统的滞后时间相对于时间常数
较大时,将分数阶滞后近似为整数滞后将使系统闭环性能恶化,严重影响系统性能品质,因此需要专门针
对分数阶滞后系统,进行参数调优方法研究.现有的参考文献中,仅文[19]提出了一种针对单变量分数阶滞
后系统的模型预测控制解析参数调优方法.由于工业应用被控对象一般为多变量系统,因此亟需研究针对
多变量分数阶系统的预测控制解析参数调优方法.
本文针对基于 FOPDT 的多变量分数阶滞后系统,详细研究模型预测控制参数的解析调优问题,最
后以 pH 中和过程为例验证该方法的控制效果.
1 问题描述
在本节中,推导多变量分数阶滞后系统的状态空间方程模型,并给出所提出 MPC 参数的调优基础
公式.结合分数阶滞后系统应用特点,其模型的建立基于假设:对于每一个输出,任一个输入的动态响应
和时滞均相同.
1.1 过程模型
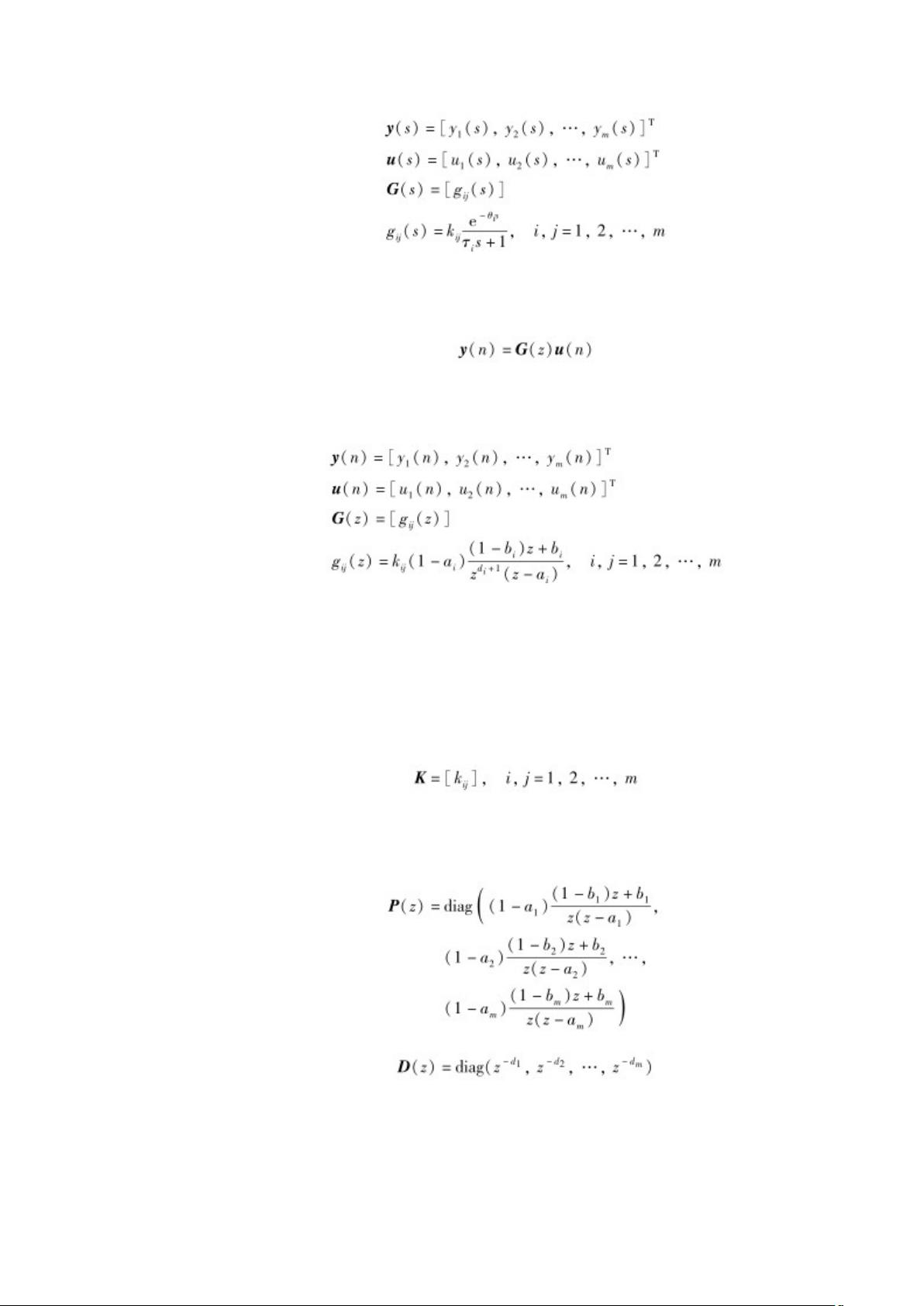
本文中所考虑的多变量系统传递函数为
(1)
其中,

剩余12页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4461
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP


相关推荐
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0
最新资源