
0 引言
由于人口老龄化、工伤、交通事故、疾病等因素的影响,膝上截肢的患者人数逐年增多,穿戴高性
能的假肢能够帮助残疾人恢复正常的生活与工作. 目前,市场上的假肢绝大多数限于无动力提供的被动型
假肢,穿戴此类假肢健康侧与残疾侧步态行走不对称导致能量消耗比健康人多 20%~30%
[1]
. 研究表明,
穿戴动力型假肢可以显著提高残疾人的活动能力
[2-3]
. 因此,动力型下肢假肢已经成为国内外学者的研究热
点
[4-6]
. 目前,动力型假肢控制方面相关研究主要包含假肢动力学系统建模、多关节协调控制以及柔顺控制
等
[7-10]
. 将动力型下肢假肢步态进行分段控制已成为主流. 文
[11]
中设计一款假肢测试机器人,在摆动相使
用滑模控制实现关节位置的准确追踪. 在支撑相假肢与地面接触,采用基于阻抗控制的假肢系统保证了假
肢穿戴者舒适性及安全性
[12]
. 文
[13]
中设计基于阻抗控制的主动型踝关节,利用动力学方程估计控制力矩.
文
[14]
中提出的基于动力学模型的假肢控制方法,其控制器的设计需要精确的动力学模型外部干扰等具有不
确定性的因素,这在建模过程中往往是很难实现的,因此传统的模型控制器控制性能会被降低. Hsia 等最
早提出时延估计(TDE)的方法来估计动力学模型
[15]
. 它可以根据先前的状态响应和控制输出来估计和补偿
机器人动力学的非线性部分和各种不确定项
[16-18]
. TDE 对外部干扰、建模误差和参数变化具有较好的鲁棒
性,目前已经得到了广泛应用
[19-21]
. 但该方法控制精度受采样时间和采样频率的影响,并且始终存在误差.
因此,文
[22]
中采用了滑模控制来补偿估计误差,提升了系统的鲁棒性. 文
[23]
中提出了基于时间延时估计的
滑模阻抗控制的方法,能够抵消不确定干扰,保证穿戴者的舒适性.
综上所述,下肢假肢模型具有非线性、强耦合性,针对传统的控制器建模不准确、设计单一的问题.
本文提出了分段控制的策略,摆动相采用时延估计的方法来简化下肢假肢的动力学计算过程,在 TDE 模
型的基础上,为了提高控制精度,减小跟踪的稳态误差引入滑模控制器来补偿时延估计产生的估计误差;
支撑相设计目标阻抗控制与基于 TDE 的滑模控制方法相结合的目标阻抗控制方法,不仅可以提高跟踪精
度,还能保证假肢穿戴者安全性.
1 人体下肢运动分析 1.1 步态信息采集
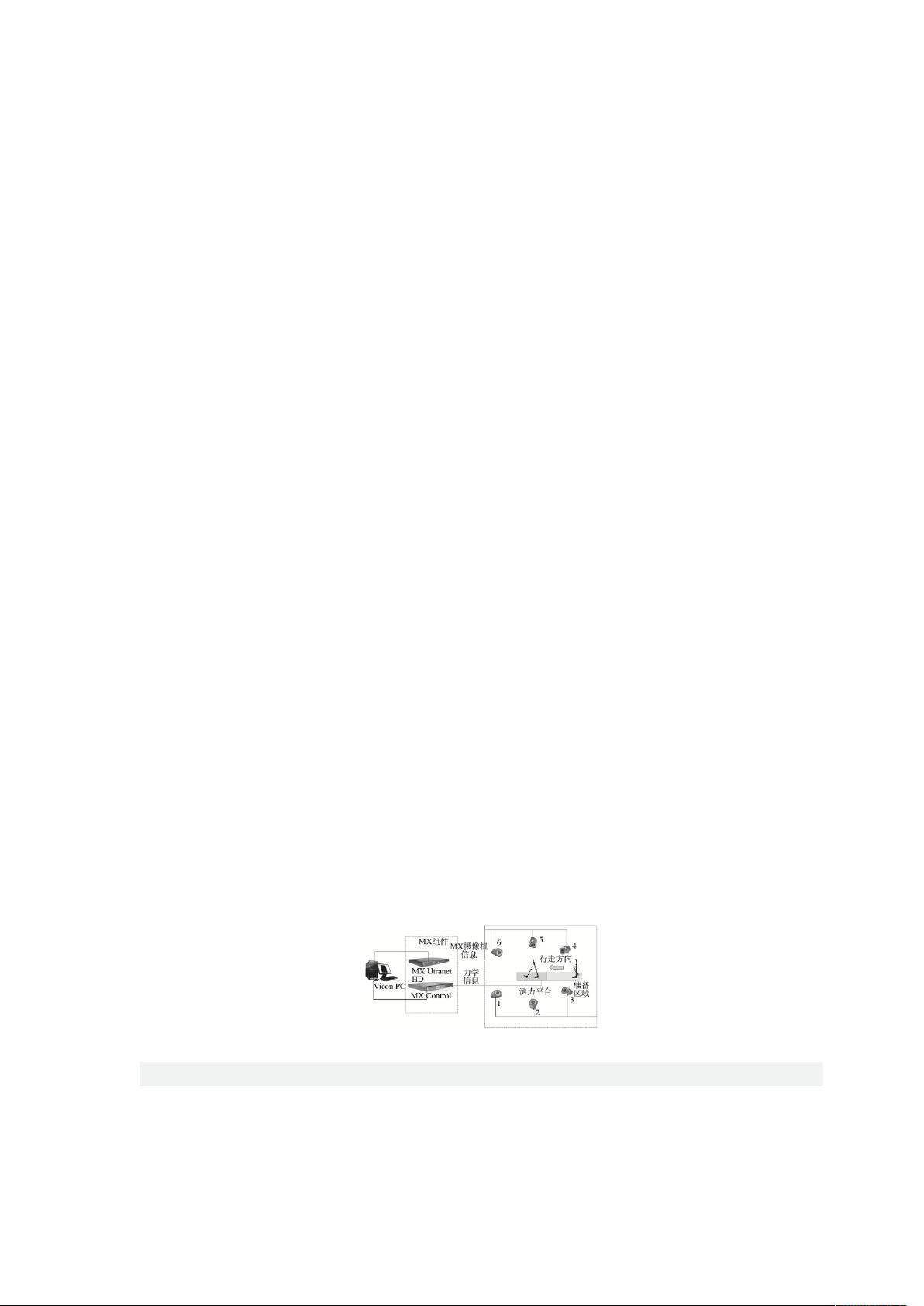
本实验采用 VICON MX 3 维步态信息捕捉设备和 AMTI 测力平台进行髋—膝—踝关节和足底压力信
息采集. VICON MX 步态采集系统包含 MX 摄像机、MX 组件、PC 主机和第三方的测力设备. 运动信息采
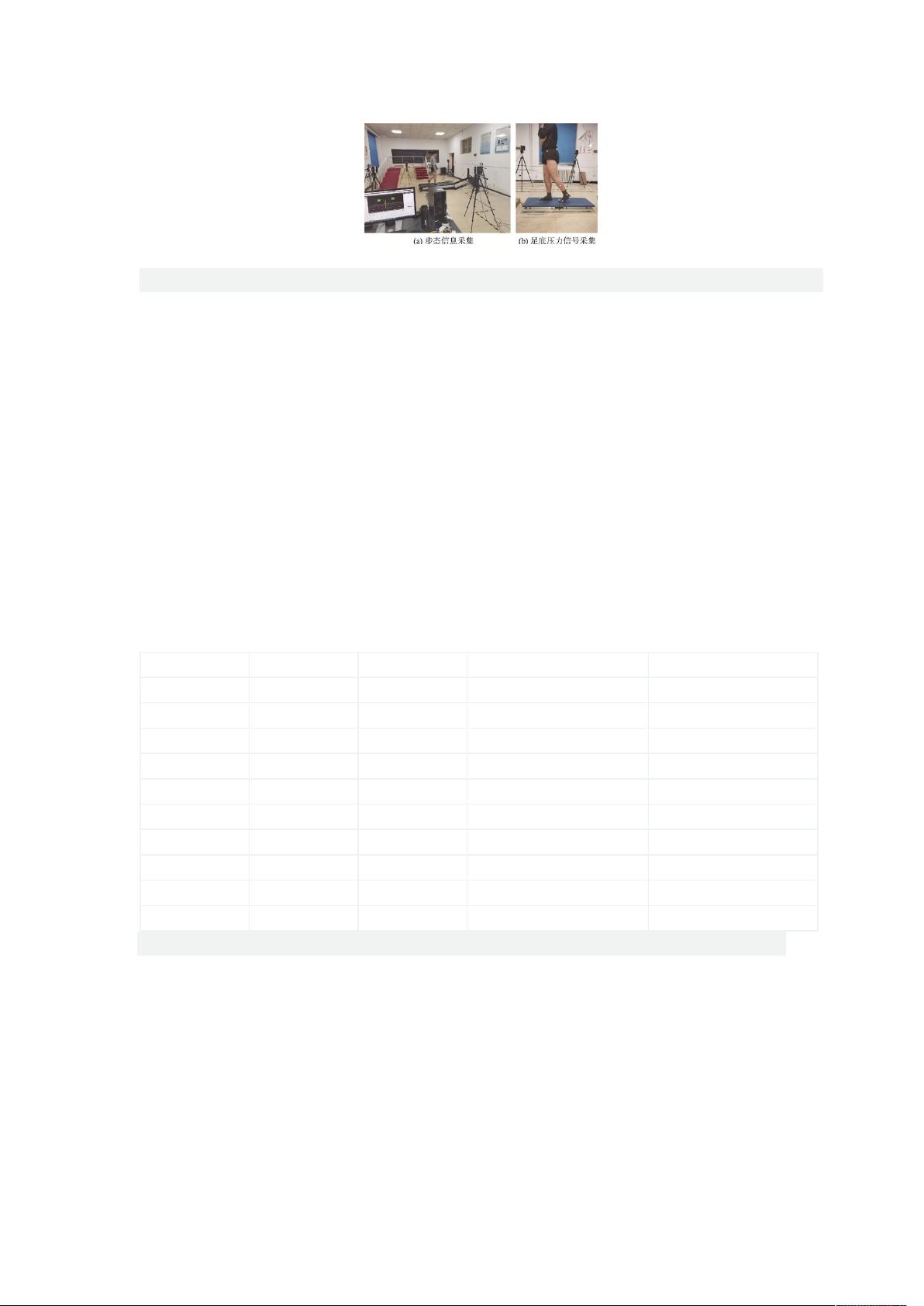
集系统如图 1 所示,采集过程如图 2 所示.
图 1 VICON MX 运动信息采集 Fig.1 VICON MX motion information collection
图选项
剩余12页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4558
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 线控转向系统:基于Carsim与Simulink联合仿真的控制策略与模型研究,线控转向系统:基于Carsim与Simulink联合仿真的控制策略与模型研究,线控转向系统联合仿真模型及控制策略研究 描述
- 基于python的订单管理系统
- 基于新算法SSA优化的变分模态分解风电功率分配策略:混合储能高效利用,创新性显著,基于新算法SSA优化的变分模态分解风电功率分配策略:混合储能高效利用与参数优化策略,基于新算法SSA优化变分模态分解的
- 【bussiness-DC】
- 使用BE、FE及C N方法求解一维扩散方程的Matlab实现,使用BE(向后欧拉)与FE(向前欧拉)算法及C N方法在Matlab中求解一维扩散方程的数值分析研究,使用BE(向后欧拉),FE(向前欧拉
- 博图16 PLC控制的4x5立体车库系统:包含运行效果视频、接线图及IO表全解析,4x5立体车库控制系统详解:博图16 PLC运行效果视频、接线图及IO表一览,4x5立体车库控制系统 博图16 带PL
- Python 智能机房签到系统:高效管理课堂考勤
- 进程上下文详细分析PDF原文
- 基于拉丁超立方采样与自适应核密度估计的电力系统概率潮流精准计算,基于拉丁超立方采样的电力系统概率潮流计算:自适应核密度估计与带宽优化的方法研究,采用拉丁超立方采样的电力系统概率潮流计算 (自适应核密度
- numpy-2.2.0-cp310-cp310-win32.whl
- numpy-2.2.0-cp310-cp310-win_amd64.whl
- 仅作测试无意义1111111111111111
- 基于PWM的 三色灯RGB模块调色 HAL库
- 商业数据分析BI+人工智能AI.zip
- 伺服驱动系统中的FPGA实现:电流环、速度环与位置环的协调控制,包含坐标变换及电机反馈接口,SVPWM技术,以及在FPGA中实现的编码器协议,伺服驱动FPGA电流环:实现坐标变换、电机反馈与SVPWM
- 基于PWM的 三色灯RGB模块调色 寄存器 代码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


