

并联机器人是机器人学的一个重要分支。并联机器人承载能力强,输入误
差不积累,动力性能好,且运动控制简单。自 1965 年 Stewart 机构诞生以来,并
联机构迅速成为国际机器人学领域的研究热点之一
[1,2,3]
。在实际生产中,并联机
器人与串联机器人因具有各自的优缺点,扩大了机器人应用领域。目前,结合串
联和并联机器人优势的混联机器人的诞生虽然在一定程度上解决了机器人工
作空间问题,但是其运动控制还是基于并联机器人原型。
相对于 6 自由度并联机构,少自由度并联机构结构简单、生产成本低、易
于操作,拥有更广阔的发展前景与发展潜力
[4]
。国内对并联机器人的研究起步较
晚,特别是针对机构综合与分析等方面的研究较少。在少自由度并联机构的综
合和运动性能研究方面,文献[5,6,7]提出了基于方位特征的并联机构拓扑结构
设计理论与方法;文献[8,9]提出了基于约束螺旋理论的机构自由度分析的原理
和方法。这两种分析方法均在并联机构的综合上做出了一定的贡献。文献[10]
基于方位特征理论提出了一类 3T1R 型四自由度高速并联机械手。文献[11]基
于螺旋理论提出了一种 4-URU 型并联机器人构型。文献[12]对 2-TPR/2-TPS
并联机构进行了仿真分析,验证了该机器人运动自由度的正确性。
本文基于方位特征理论与方法,对 3-TRT/SPS 并联机构进行结构拓扑分析,
求解了其独立自由度。随后,在机构分析的基础上采用解析法获得了机器人正
反解,并使用极坐标搜索法求出了机器人工作空间,为少自由度并联机器人的发
展做出了一定贡献。
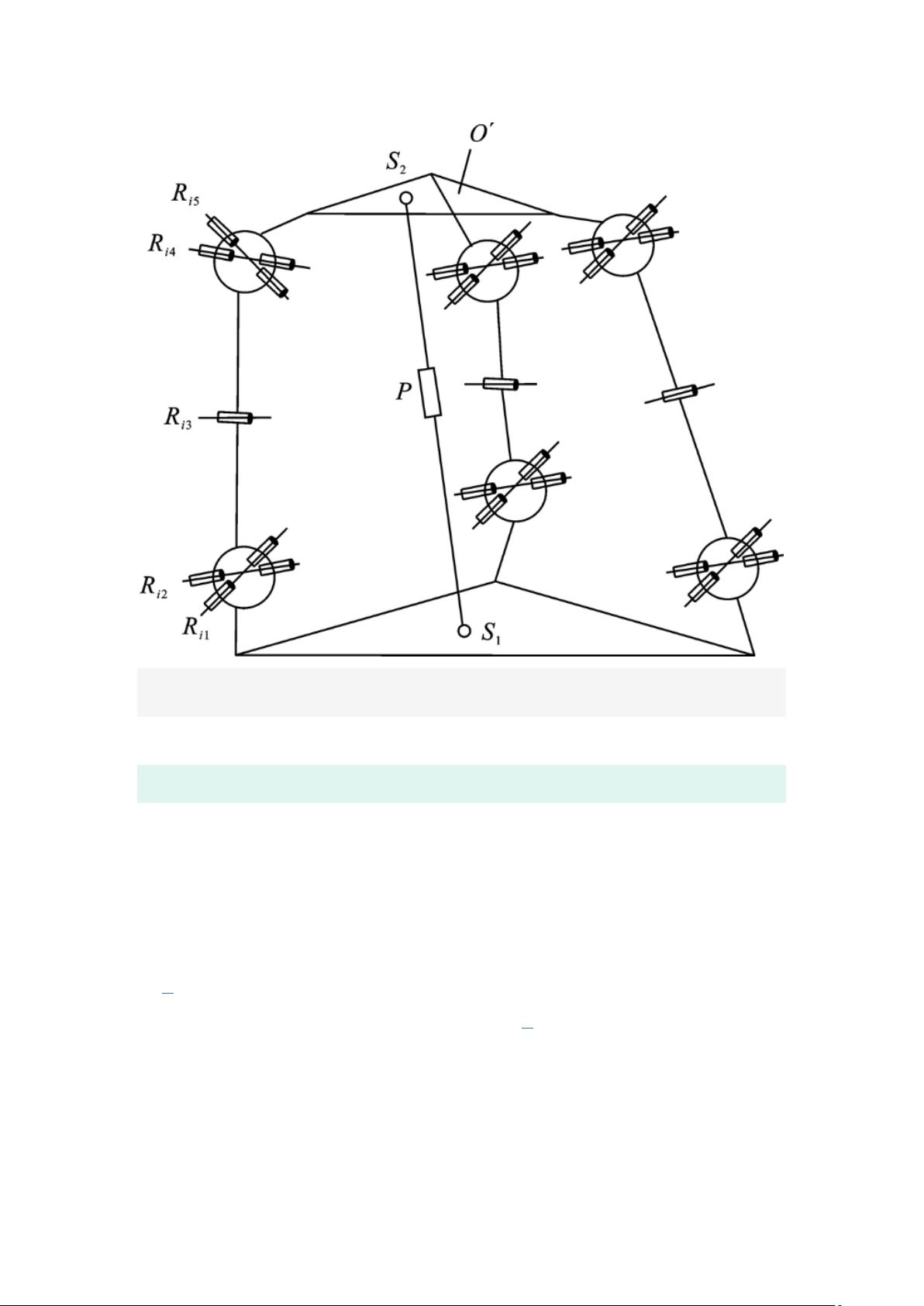
1 机器人的结构特点
3-TRT/SPS 的三维模型如图 1 所示。该并联机器人具有 4 个支链、3 个对
称分布的 TRT 支链以及连接动、定平台的 SPS 支链。每个 TRT 支链由连接
动、定平台的两个虎克铰 T(由两个相互正交的转动副组成)和一个转动副 R 组
成。每个 TRT 支链可以看作是由 5 个转动副组成,其中和上下平台相连的两个
转动副轴线互相平行,其余 3 个转动副轴线互相平行,且与另两个转动副轴线垂
直。SPS 支链由两个球铰和一个移动副组成,两个球铰分别与动静平台的几何
中心相连。为了方便描述机器人的运动,可建立如图 2 所示的拓扑结构简图。
该简图清楚地描绘了整机的连杆和运动副配置。
图 1

剩余19页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4427
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- CNKI-20241108164243230.es6
- Go-基于linux时间轮的高效低精度定时器+项目源码+文档说明
- 创维5S02机芯 15U50系列 20151207主程序软件 电视刷机 固件升级包
- 基于Linux+ARM-CotexA53+sqlite3的停车场计费系统设计与实现+项目源码+文档说明
- 2023年GPT-4v多模态技术进展与应用前景分析
- 编译原理课程设计,Python基于有穷自动机的类 C 语言词法分析器源代码+使用说明
- XC7Z010CLG-400 HDMI文字叠加实验完整工程
- 利用自定义注解与Hutool库对SpringBoot接口返回数据进行高效脱敏处理
- 传媒行业研究报告:聚焦AI辅助创作与AIGC能力的产品化进展 - 2023年上半年值得买(300785)公司业绩点评
- 本科毕业设计-基于WIFI网络的车间设备监测与控制系统+项目源码+文档说明
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


