无人机辅助边缘计算的能量效率最大化算法设计.docx
版权申诉
200 浏览量
2022-05-31
08:42:56
上传
评论
收藏 207KB DOCX 举报


1 引言
随着信息通信技术的高速发展,人类社会开始进入万物互联的信息时代。
智能移动设备的空前普及为许多新型智能应用提供了强大的平台,与此同时也
带来了诸多新的挑战。智能化的应用(如人脸识别、交互游戏、自动驾驶等)
往往计算任务密集且对时延敏感
,然而,大多数移动终端计算能力和电能储
备 有 限 , 无 法 独 立 胜 任 当 下 需 求 。 移 动 边 缘 计 算 (
)通过将云计算
和信息技术服务部署到网络边缘,提供辅助计算,
可有效降低任务处理时延、避免网络拥塞、提高终端设备电池使用寿命
。
近年来,移动边缘计算被广泛研究用于提升蜂窝网络的能量效率、减少时
延或最大化网络运营的系统效用
。文献
研究了非线性无线供能的 网络
中 计 算 能 效 最 大 化 问 题 , 在 时 延 受 限 的 情 况 下 , 分 别 对 时 分 多 址 接 入
( ) 和 非 正 交 多 址 接 入
( !"#)方式下的部分卸载与二元卸载进行
了分析比较。针对部署缓存的 ! 异构网络下的基站用户匹配及功率分配问
题,以最大化缓存收益为目标,对功率资源和用户调度进行了合理设计,显著
提升了系统吞吐量和时延等性能。在安全通信方面,针对有恶意窃听者的情况 ,
文献$
引入安全中断概率度量 ! 系统的安全性能,以最小化加权和
能耗为优化准则,设计了最佳的资源分配方法。在此基础上,文献 %
进一步探
究了在用户设备能量受限的情况下安全中断概率最小化问题,并给出了相应的
最优安全卸载速率和功率分配方案。针对中继辅助的跨蜂窝移动边缘计算网络 ,
文献&
提出了一种混合中继转发协议以实现两终端设备之间的单向计算结果共
享,利用非严格块坐标下降法有效地实现了执行时延与网络能耗之间的均衡。
对原始数据压缩后再进行传输可有效提升网络吞吐量,基于此,文献 '
提出了
一种 辅助的计算与中继方案,以增强点对点通信系统吞吐量,通过对动态
压缩率和发送功率进行联合优化设计,实现了能耗和时延的有效均衡,突破了
传统点对点通信系统的性能瓶颈。
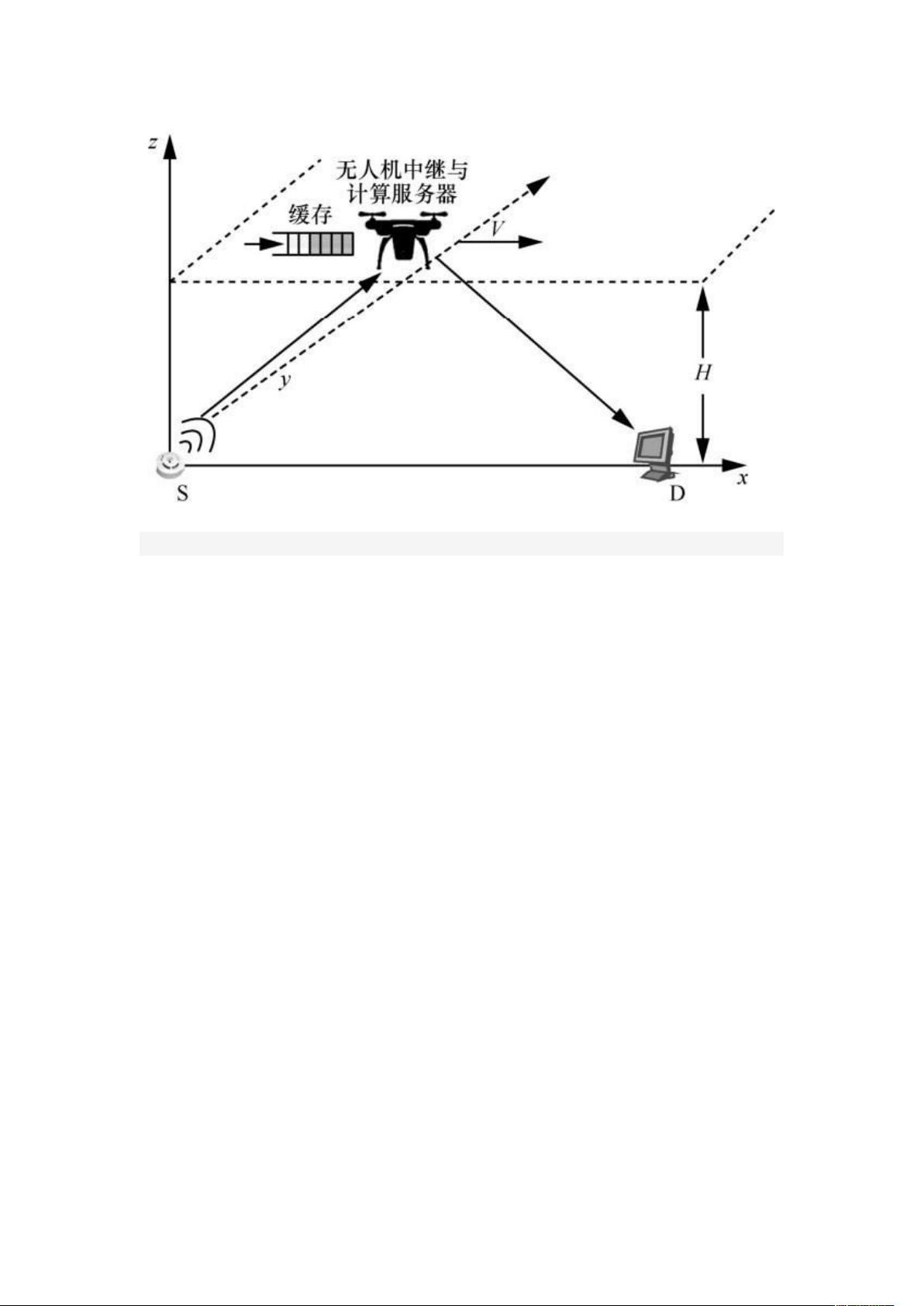
无人机(()"#)辅助的边缘计算与通信具备可灵
活部署、机动性强、视距通信等诸多天然优势。利用无人机的灵活移动特性并
给其配备具有一定运算处理能力的计算服务器,可实现对终端设备计算任务的
高能效、低时延辅助处理
'
*
。与此同时,无人机辅助的边缘计算系统也面
临着诸多现实挑战。无人机能量有限,如何高效地利用有限的通信和计算资源 ,
设计最佳的飞行轨迹,最终以一种高能效的方式快速完成任务的辅助计算和共
享,是研究者普遍关注的问题。此外,无人机飞行抖动及方向变化带来的信号
波束实时动态调整、多无人机辅助时的无人机与地面用户动态关联等现实问题
都给无人机辅助的边缘计算带来不少的挑战。文献'
给无人机配备处理服务器
以帮助多个用户终端设备计算卸载的任务,通过对无人机的飞行轨迹和任务卸
载比特划分进行联合优化,实现了总的移动计算能耗最小化。进一步地,考虑
到终端设备自身储能的局限性,文献*
将无线供能模块引入无人机设备,在辅
助地面终端任务计算的同时利用视距信道对其进行无线供能,相较于传统的地
面基站无线供能更加高效灵活。通过利用交替优化算法,在部分卸载和二元卸
载这 种模式下最大化系统的计算速率。在无人机和可利用地面基站同时存在
的情况下
,无人机在充当移动边缘计算辅助器的同时可作为空中中继,将部分
计算任务二次卸载到地面基站,以减轻无人机的计算负担。为实现较高的系统

剩余19页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3654
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











