孤岛模式下的下垂控制是微电网运行中的一个重要概念,特别是在分布式能源系统中。当微电网与主电网断开,形成“孤岛”状态时,下垂控制是维持电压和频率稳定的关键技术。本文将深入探讨下垂控制的原理、其在MATLAB仿真的应用以及PID参数整定的方法。
下垂控制是一种自我调节机制,它通过调整分布式发电单元(如光伏、风能等)的无功功率和有功功率与电压和频率的关系来保持系统的稳定。在孤岛模式下,由于没有主电网的支撑,微电网需要自身调节电力供需平衡,下垂控制则为实现这一目标提供了有效的手段。它通过设定一定的下垂特性曲线,使得电压下降时增加无功功率输出,频率降低时增加有功功率输出,从而达到稳定系统的目的。
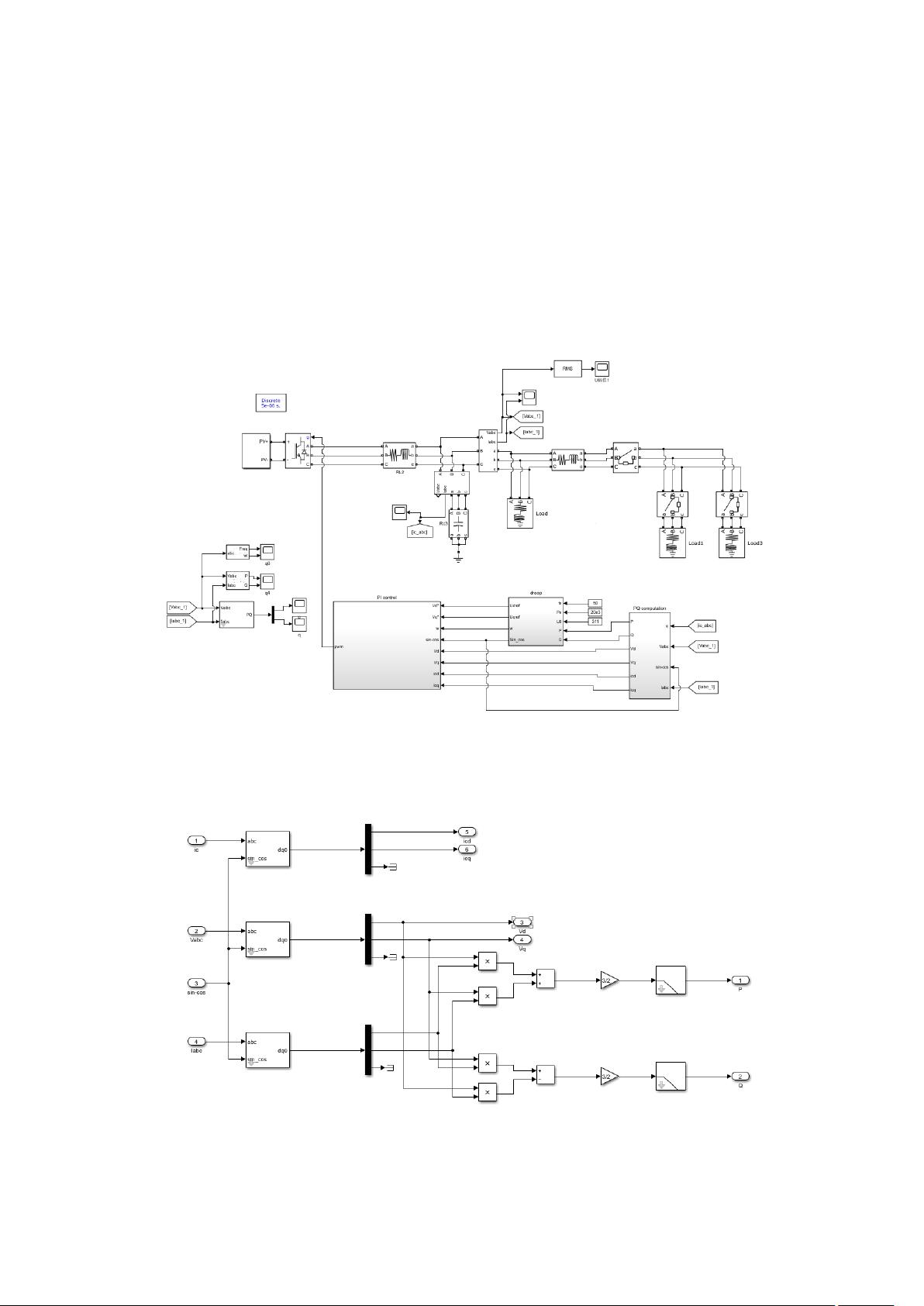
MATLAB作为强大的数学建模和仿真工具,被广泛用于电力系统的研究和分析。在孤岛模式的下垂控制仿真中,我们可以利用MATLAB的Simulink模块建立微电网模型,包括发电机、负荷、储能装置等,并设定下垂控制策略。通过调整下垂系数,可以观察到系统在不同条件下的响应,这对于理解和优化控制策略非常有帮助。
PID(比例-积分-微分)控制器是工业控制中最常见的控制器类型,它结合了比例、积分和微分三个部分,能够有效地减小误差并提高控制性能。在下垂控制中,PID参数的整定对于系统的动态响应和稳态精度至关重要。通常,我们可以通过手动试凑、Ziegler-Nichols法则、自适应算法等方式进行参数整定。在MATLAB中,可以利用内置的PID Tuner工具,根据系统的动态响应实时调整参数,以达到期望的控制效果。
在"droop孤岛模式的下垂控制及其PID参数整定"这个文件中,我们很可能会看到一个具体的MATLAB仿真实例,包括下垂控制的实现、系统动态响应的模拟以及PID参数调整的过程。通过学习这个案例,初学者可以直观地理解下垂控制的工作原理,掌握如何在实际系统中应用和优化这一技术。
总结来说,孤岛模式下的下垂控制及其PID参数整定是微电网稳定运行的核心技术。通过MATLAB仿真,我们可以深入研究下垂控制策略的实施和PID控制器的参数设定,这对理解和提升微电网控制系统的性能具有重要意义。

 droop孤岛模式的下垂控制及其PID参数整定.zip (3个子文件)
droop孤岛模式的下垂控制及其PID参数整定.zip (3个子文件)  droop孤岛模式的下垂控制及其PID参数整定
droop孤岛模式的下垂控制及其PID参数整定  binwangLIWANG.mdl 212KB
binwangLIWANG.mdl 212KB 光伏并网离网中的PQ解耦和下垂控制.docx 314KB
光伏并网离网中的PQ解耦和下垂控制.docx 314KB













- 1
- 2
- 3
- 4
- 5
前往页