







LS01B 型激光雷达
简介与规格书
1
LS01B 二维低成本全角度激光扫描雷
达简介与规格书
型号:LS01B
(波特率 460800)
V1.0
深圳市镭神智能系统有限公司

LS01B 型激光雷达
简介与规格书
2
简介
LS01B 型激光雷达是深圳市镭神智能系统有限公司研发的一款低
成本二维扫描测距产品。该激光雷达可以实现 25 米范围内 360 度二
维平面扫描,产生空间的平面点云地图信息用于地图测绘、机器人自
主定位导航、智能设备避障等应用。
LS01B 激光雷达采样率和扫描频率可调整。默认每秒采样 14400
点、扫描频率 10hz,角度分辨率为 0.25 度。
LS01B 采用深圳市镭神智能系统有限公司研发的激光三角测距系
统,在各类室内环境以及 25,000lux 光照以下的室外环境下表现俱
佳。
LS01B 型激光雷达
简介与规格书
3
原理
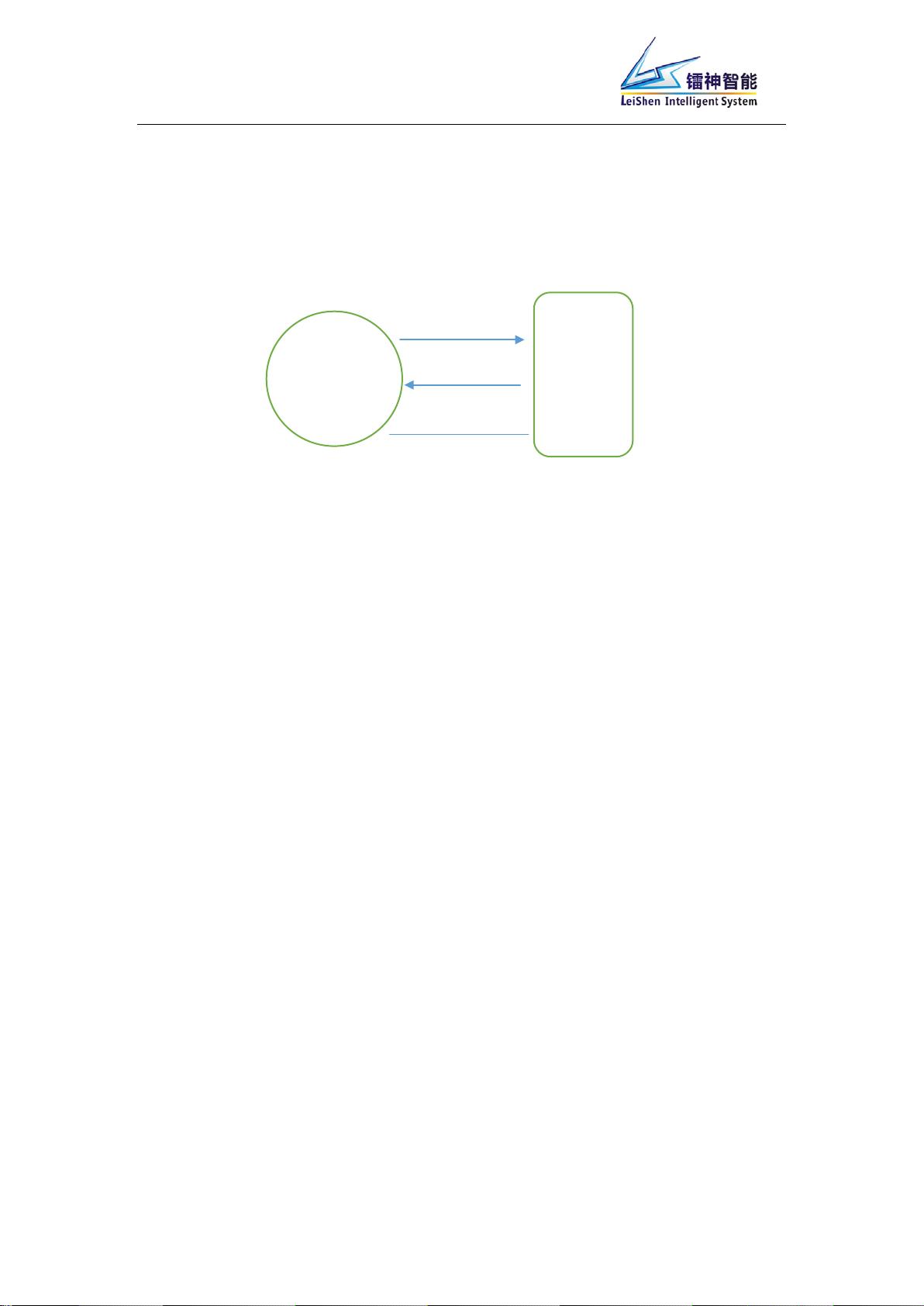
LS01B 激光雷达采用了激光三角测距原理,通过镭神智能团队开
发的高频图像采集处理系统,默认工作的测量频率为每秒 14400 点,
每次测距过程中,LS01D 的脉冲调制激光器发射红外激光信号,该激
光信号照射到目标物体后产生反射光斑,该反射光斑经过一组光学透
镜由 LS01B 的图像采集处理系统接收。经过 LS01B 的内嵌信号处理模
块实时解算,目标物体与 LS01B 雷达的距离值以及相对方位角度值将
从通讯接口中输出。
在机械旋转模块的带动下,LS01B 的高频核心测距模块将进行顺
时钟旋转,从而实现对周围环境 360 度扫描测距。
LS01B 型激光雷达
简介与规格书
4

LS01B 型激光雷达
简介与规格书
5
连接
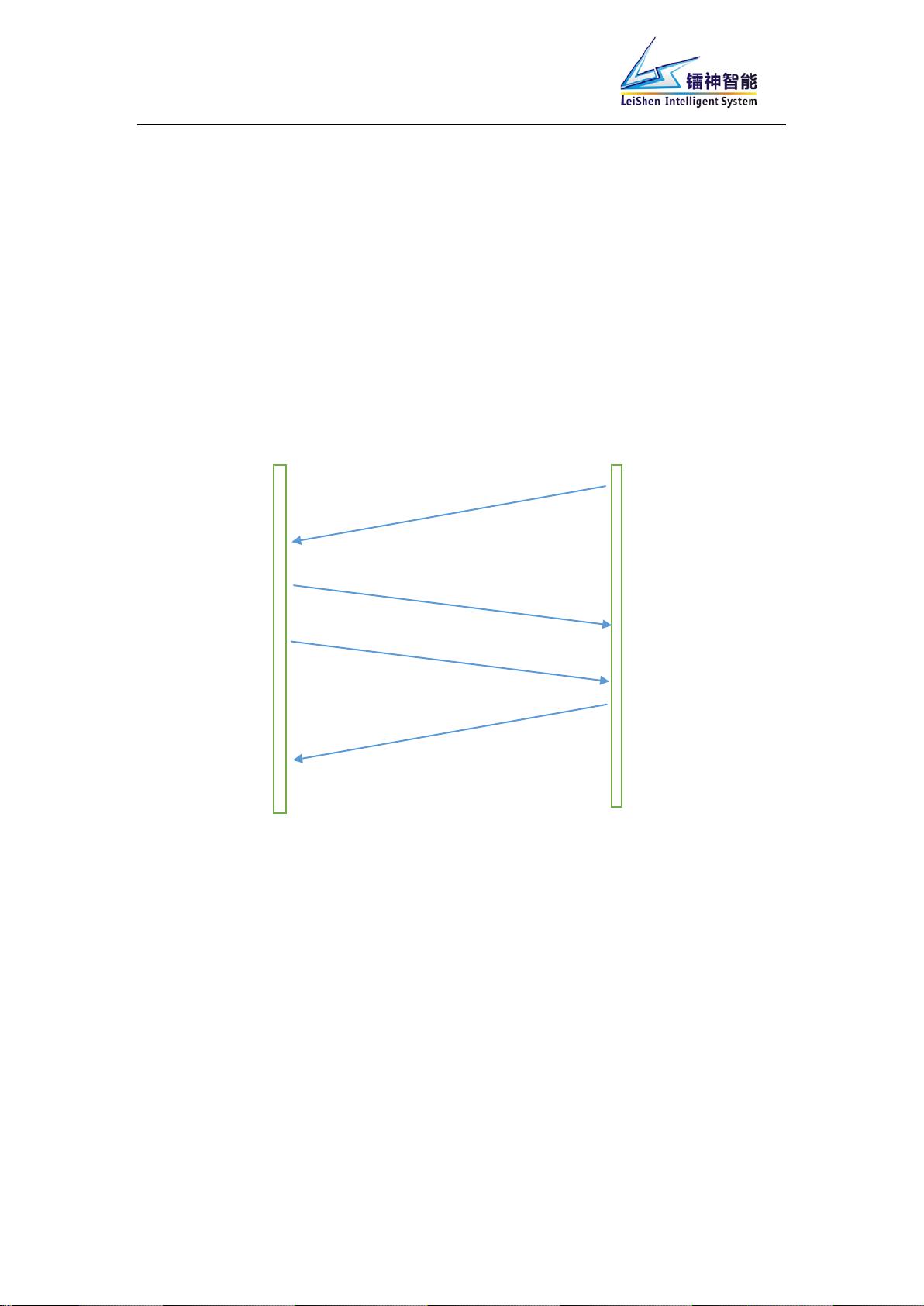
LS01B 型激光雷达主要由高频测距核心、无线传输系统、旋转子
系统构成。旋转子系统由无刷步进电机中轴驱动,在系统内部旋转。
用户可以通过调节子系统的旋转参数从而达到修改扫描频率的目的。
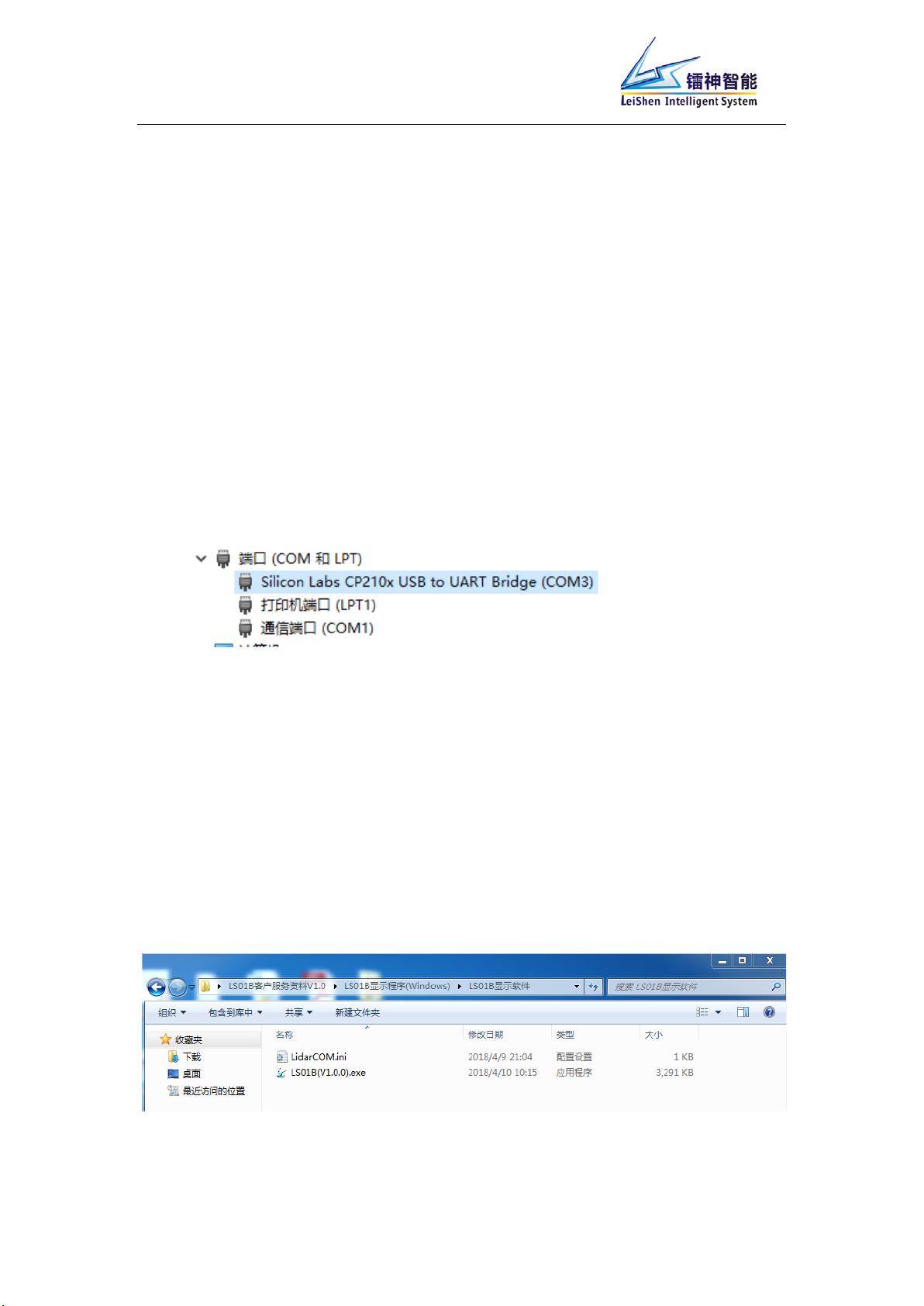
LS01B 的信号线可以直接与 FPGA/DSP/ARM/单片机的 UART 口对接,无
需 RS232、422 等芯片转换。系统正确上电后,高频测距核心将用户
可以通过 LS01B 的通讯接口(RS232/USB 等)获取 LSLIDAR 的扫描测
距数据。
LS01B 系统自带转速检测功能,用户可以通过指令实时获取转速
信息,用户通过指令可控制转速;系统内置电机转速稳定算法,对外
界环境变化引起的转速变化有较强的矫正能力。













