

一、Air(分类空中点)
Air 程序对明显高于中间点的高程的点进行分类。它可以用来对空中
的噪声进行分类。对于每个点,程序将查找给定搜索半径内的所有相邻点 ,
它计算点的中间高程和高程值的标准偏差。如果某个点的值大于标准差乘
以中间高程以上给定因子的值,则该点被归类为空中点。使用标准差进行
比较的结果是,在高程变化较大的地方,常规方法不太可能对点进行分类。
适用范围:可用于空中飘点的检测,但是这个程序由于需要对每个点进
行判断因此程序使用起来会非常的慢。我们也可以看到这个程序不能对那
些孤立的空中飘点进行分类,因为它需要在搜索半径内搜索到指定的点数
之后才能进行一个判断。
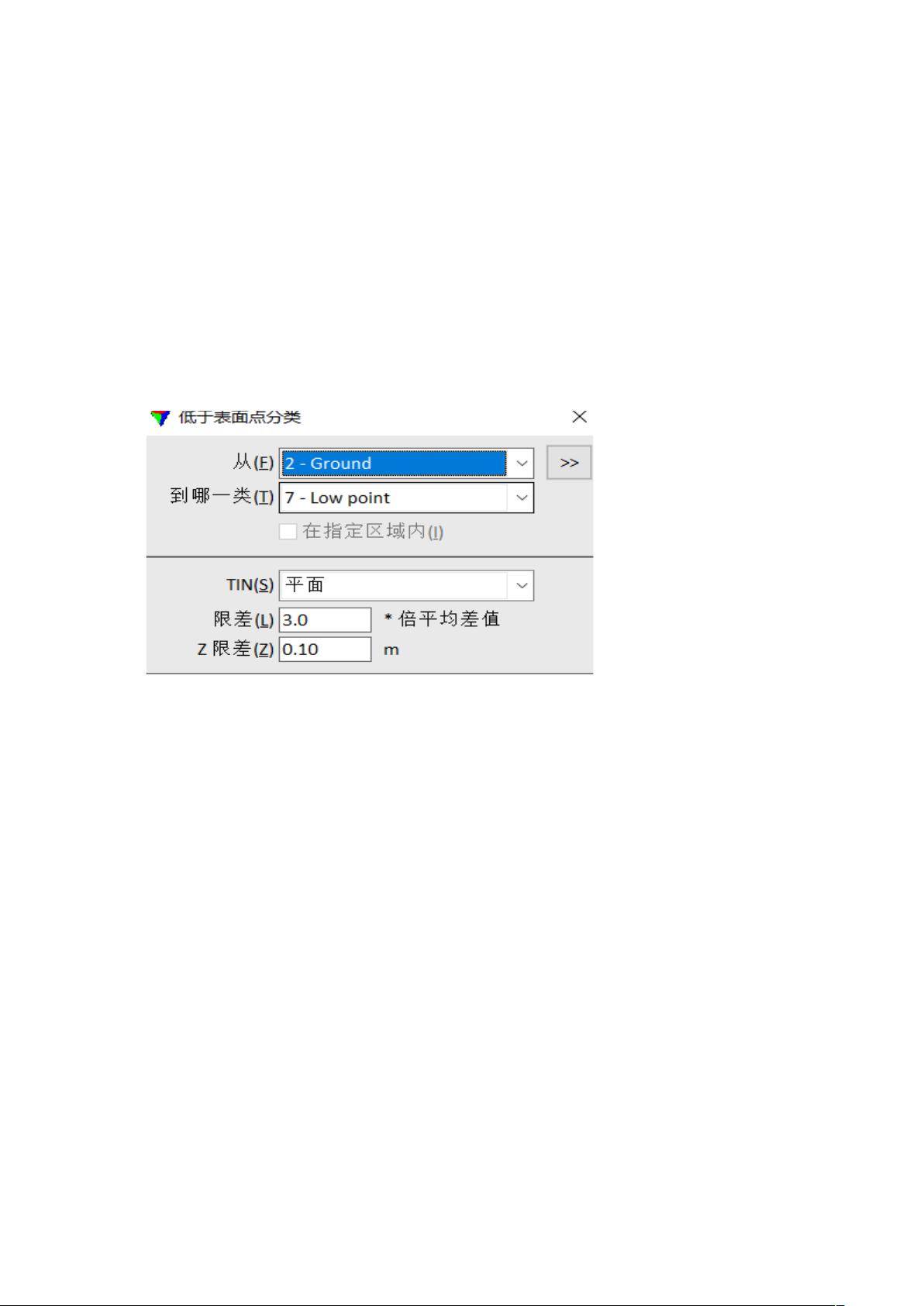
二、Below Surface(低于表面点)
剩余12页未读,继续阅读
资源评论


weixin_50352983
- 粉丝: 0
- 资源: 1









最新资源
- 使用JAVA开发的飞机大战小游戏,包括i背景图以及绘制.zip竞赛
- 使用java代码完成一个联机版五子棋applet游戏.zip
- Linux系统上FastDFS相关操作脚本与软件包.zip
- W3CSchool全套Web开发手册中文CHM版15MB最新版本
- Light Table 的 Python 语言插件.zip
- UIkit中文帮助文档pdf格式最新版本
- kubernetes 的官方 Python 客户端库.zip
- 公开整理-2024年全国产业园区数据集.csv
- Justin Seitz 所著《Black Hat Python》一书的源代码 代码已完全转换为 Python 3,重新格式化以符合 PEP8 标准,并重构以消除涉及弃用库实现的依赖性问题 .zip
- java炸弹人游戏.zip学习资料程序资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


