



课程名称:电子工艺实习
实验名称:两轮平衡智能小车组装与调试
姓 名
学 院 电子工程学院
专 业
班 级
学 号
2021
年 9 月 12 日
实习总结
一、 实习任务要求
1. 完成一块练习板的焊接;
2. 两人一组完成智能平衡车的焊接、组装、编程调试及外观设计等
工作,要求小车能够实现自动平衡、前进、停车、后退、左转、右转
等功能,并且能够结合超声波测距模块 HC-SR04 完成避障等功能。
二、 设计思路
2.1 硬件部分
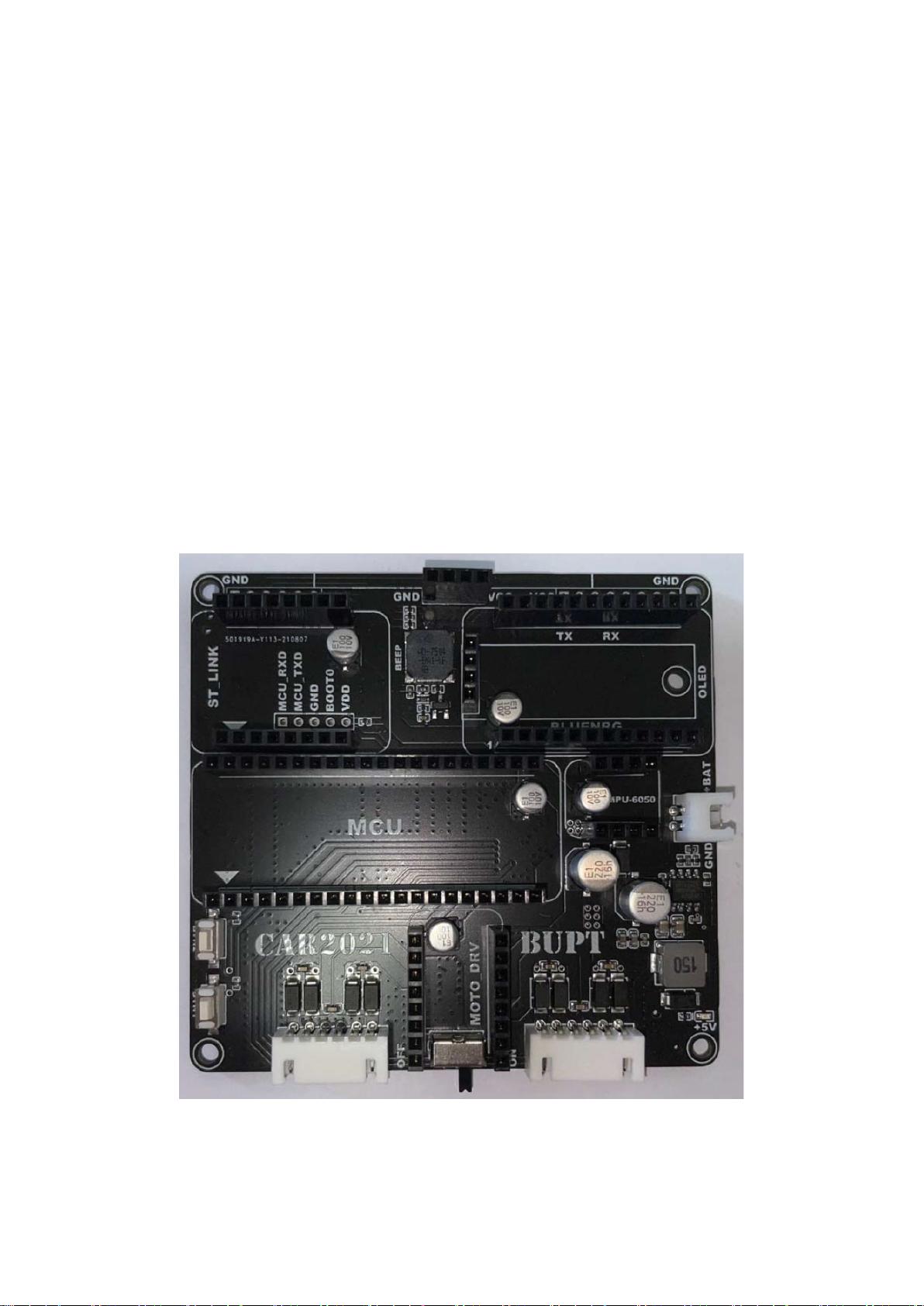
安装小车所需硬件如下:
平衡车主板

单片机核心板
ST-Link 下载板 电机驱动板
MPU6050 传感器板 电池主板
超声波测距模块 HC-SR04
硬件部分的主要工作是焊接,经过暑假期间全国大学生电子设计
大赛的培训工作,我已经对烙铁的使用较为熟悉。但为进一步提高焊
接水平,我对此次焊接练习仍格外小心。
在此次焊接练习及小车硬件焊接中,我学习到了以下焊接技巧:
1)焊接前,应将元件的引线截去多余部分后挂锡。若元件表面被氧
化不易挂锡,应使用细砂纸或小刀将引线表面清理干净,用烙铁头沾
适量松香芯焊锡给引线挂锡;
2)焊接时,把挂好锡的元件引线置于待焊接位置,用沾有适量锡的
烙铁头在焊接部位停留 3 秒钟左右,待电烙铁拿走后,焊接处形成一
个光滑的焊点;
3)焊接完后,要仔细观察焊点形状和外表。焊点应呈半球状且高度
略小于半径,不应该太鼓或者太扁,外表应该光滑均匀,没有明显的
气孔或凹陷,否则都容易造成虚焊或者假焊。在一个焊点同时焊接几
个元件的引线时,更加要注意焊点的质量;
4)靠增加接触面积来加快传热加热时,应该让焊件上需要焊锡浸润
的各部分均匀受热,而不是仅仅加热焊件的一部分,更不要采用烙铁
对焊件增加压力的办法。
2.2 软件部分
本次实习的软件部分的核心在于 PID 算法,故此处对其进行简要
介绍:
PID 控制器(比例-积分-微分控制器),由比例单元( Proportional)、
积分单元(Integral)和微分单元(Derivative)组成。可以通过调整
这三个单元的增益 K
p
,K
i
和 K
d
来调定其特性。PID 控制器主要适用于基
本上线性、且动态特性不随时间变化的系统。
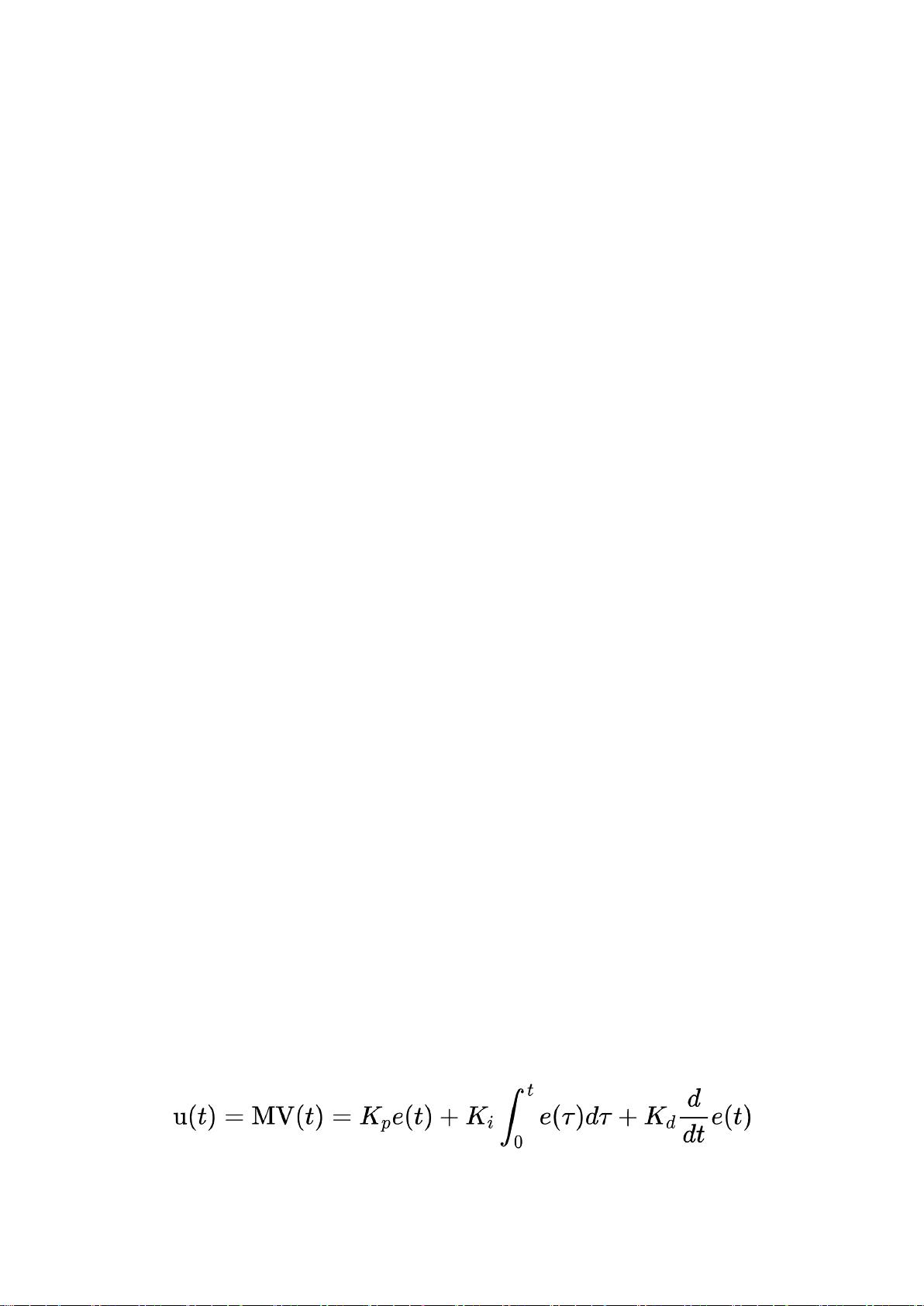
PID 以它的三种纠正算法而命名。受控变数是三种算法(比例、
积分、微分)相加后的结果,即为其输出,其输入为误差值(设定值
减去测量值后的结果)或是由误差值衍生的信号。若定义为 u(t)控制
输出,PID 算法可以用下式表示:

其中,
K
p
:比例增益,是调适参数;
K
i
:积分增益,也是调适参数;
K
d
:微分增益,也是调适参数;
e:误差 = 设定值(SP)- 回授值(PV);
t:目前时间;
τ:积分变数,数值从 0 到目前时间 t。
用更专业的话来讲,PID 控制器可以视为是频域系统的滤波器。
在计算控制器最终是否会达到稳定结果时,此性质很有用。如果数值
挑选不当,控制系统的输入值会反复振荡,这导致系统可能永远无法
达到预设值。
PID 控制器的一般转移函数是:
其中 C 是一个取决于系统带宽的常数。
三、 实现过程
3.1 小车焊接与组装
凭借之前的焊接经验及练习板的焊接,本小组小车的焊接整体较
为顺利,但在焊接过程中仍需注意以下几点:
1)不要长时间让烙铁接触电路板,否则很容易损坏电路板;
2)注意避免虚焊的情况出现;
在小车安装过程中,需要注意以下几点:
1)电池的正反要装对,否则可能损坏电池板;
2)在小车安装完成前不要安装电池;
3)电机方向安装要正确,同时磁环要紧贴住设计结构;
3.2 平衡功能实现
为 实现平衡功能,首先在 函数
MotoCtrlInit()
中 将 变量
g_DistanceSet
初始化为 0,并对左右脉冲值、叠加脉冲值等进行初始
化:













- 1
- 2
- 3
- 4
- 5
前往页