自动控制原理第四版PDF笔记 梅晓榕

需积分: 0 95 浏览量
更新于2020-12-21
3
收藏 1.8MB RAR 举报
《自动控制原理》是自动化及相关领域的重要教材,梅晓榕教授的第四版更是经典之作。本资料包包含的PDF笔记涵盖了该书的核心内容,旨在帮助读者深入理解和掌握自动控制系统的理论与方法。以下是对各章节内容的详细阐述:
第一章 自动控制概述:
自动控制原理的研究对象主要是动态系统,尤其是那些具有反馈机制的控制系统。本章首先定义了自动控制的基本概念,如控制器、被控对象、传感器和执行器等,并介绍了控制系统的分类,如开环控制和闭环控制。此外,还讨论了控制系统的稳定性,这是系统性能评价的基础。
第二章 系统的数学模型:
这一章的重点在于建立控制系统的数学描述,包括微分方程、传递函数和状态空间模型。微分方程描述了系统内部的动态关系,传递函数则通过频率响应来表征系统的动态特性,而状态空间模型则是以向量形式表示系统内部所有变量的动态行为,为控制器设计提供了更为灵活的框架。
第三章 控制系统的时域分析法:
时域分析法主要研究系统在输入信号作用下的时间响应。本章介绍了时间域内系统性能指标,如上升时间、超调量、调节时间和稳态误差。通过Routh-Hurwitz判据可以判断闭环系统的稳定性,而Nyquist稳定判据则用于分析系统的频率特性与稳定性之间的关系。此外,还讲解了根轨迹法的初步知识,为后续章节的学习打下基础。
第四章 根轨迹法:
根轨迹法是分析和设计控制系统的有力工具,它直观地揭示了系统参数变化对系统稳定性的影响。本章深入探讨了根轨迹的基本概念、绘制规则以及根轨迹的应用,如利用根轨迹调整控制器参数以改善系统性能。
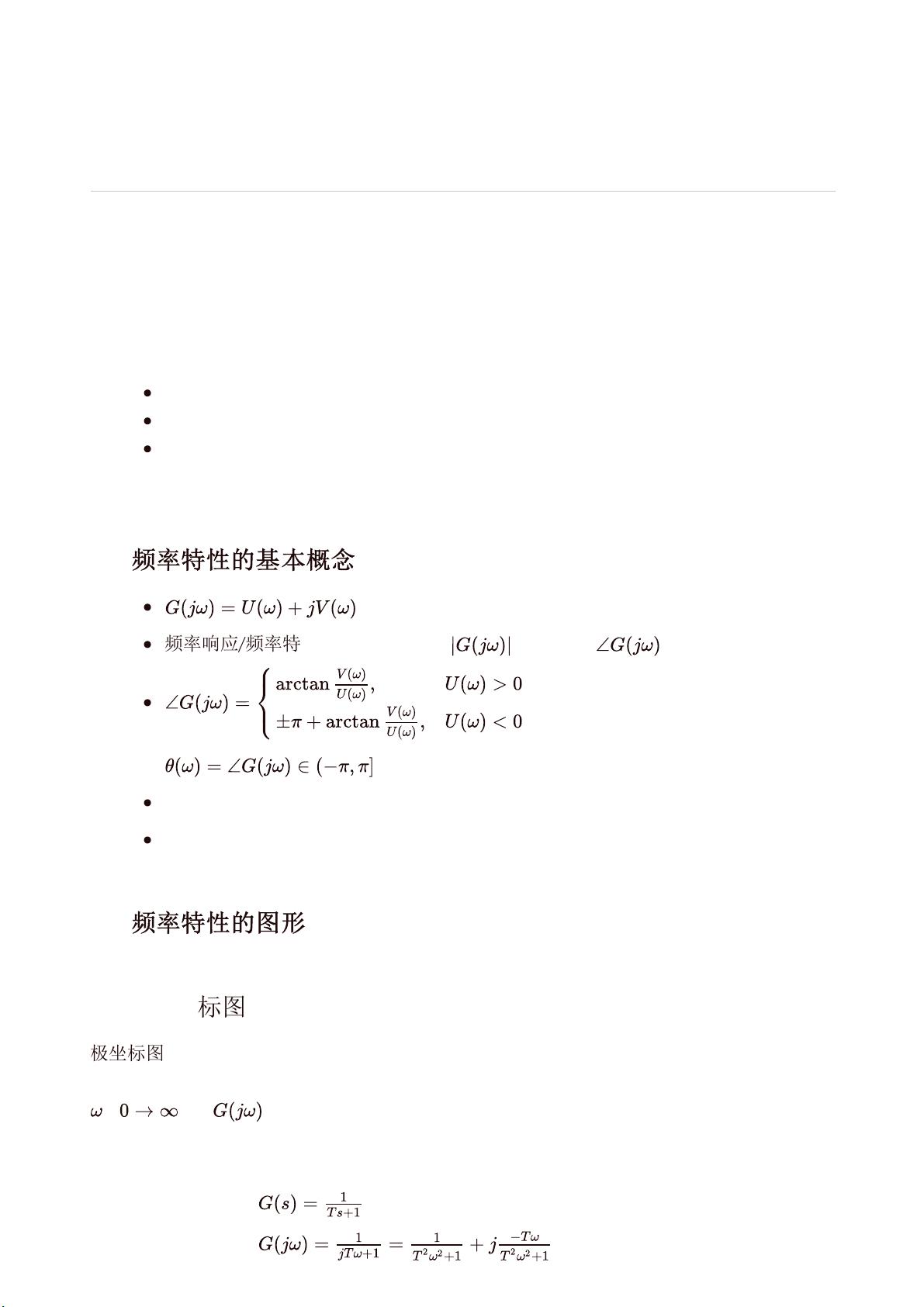
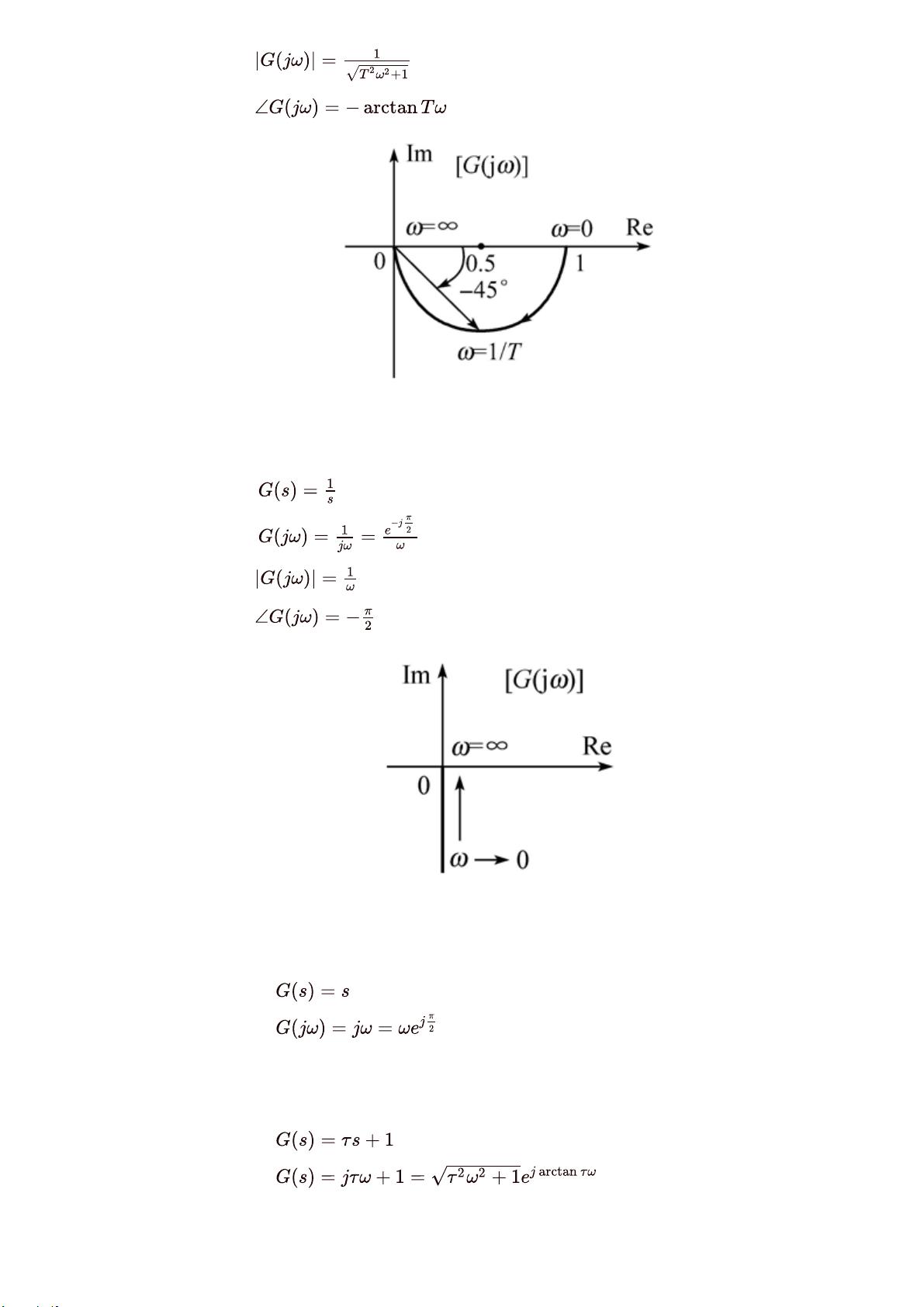
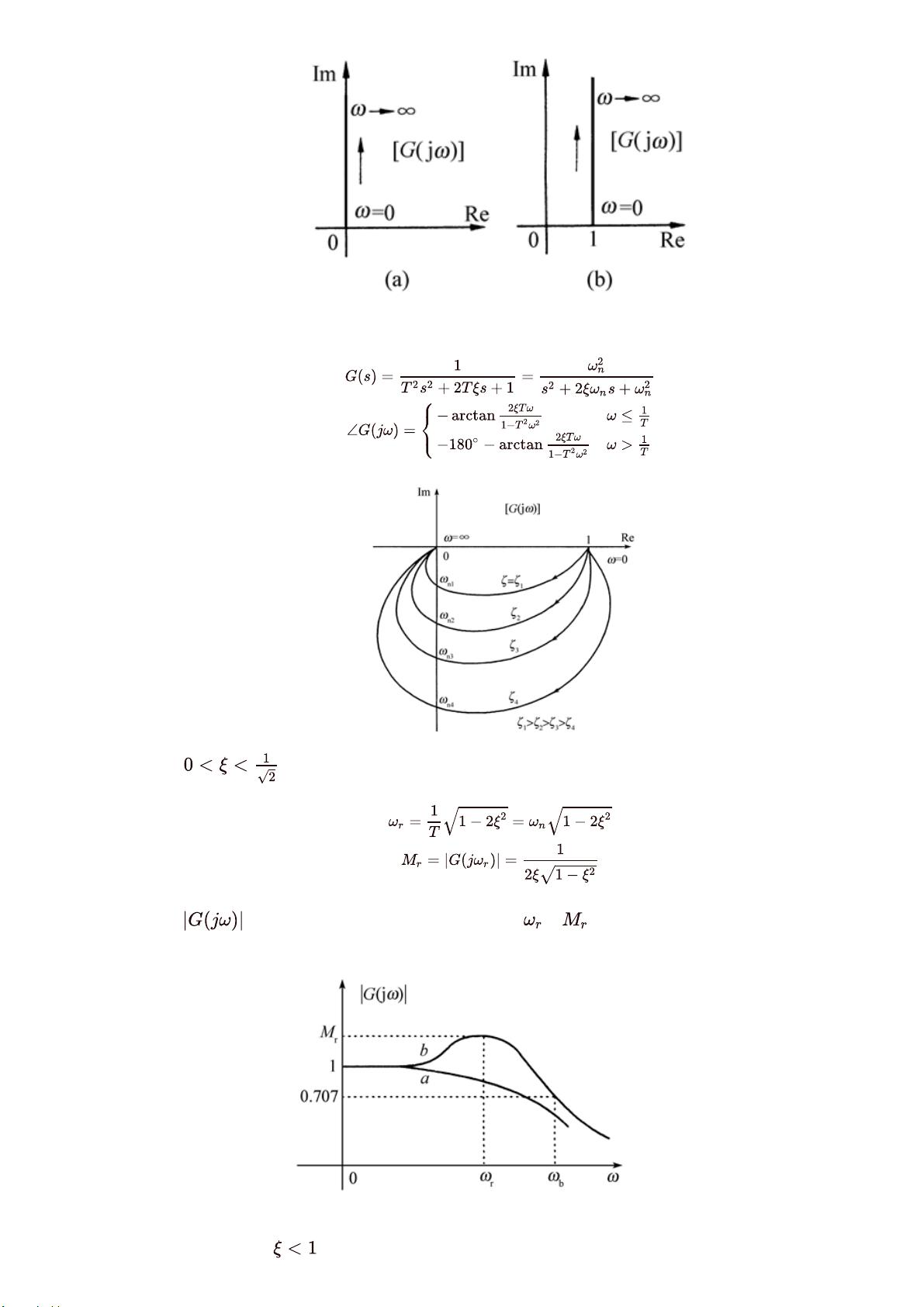
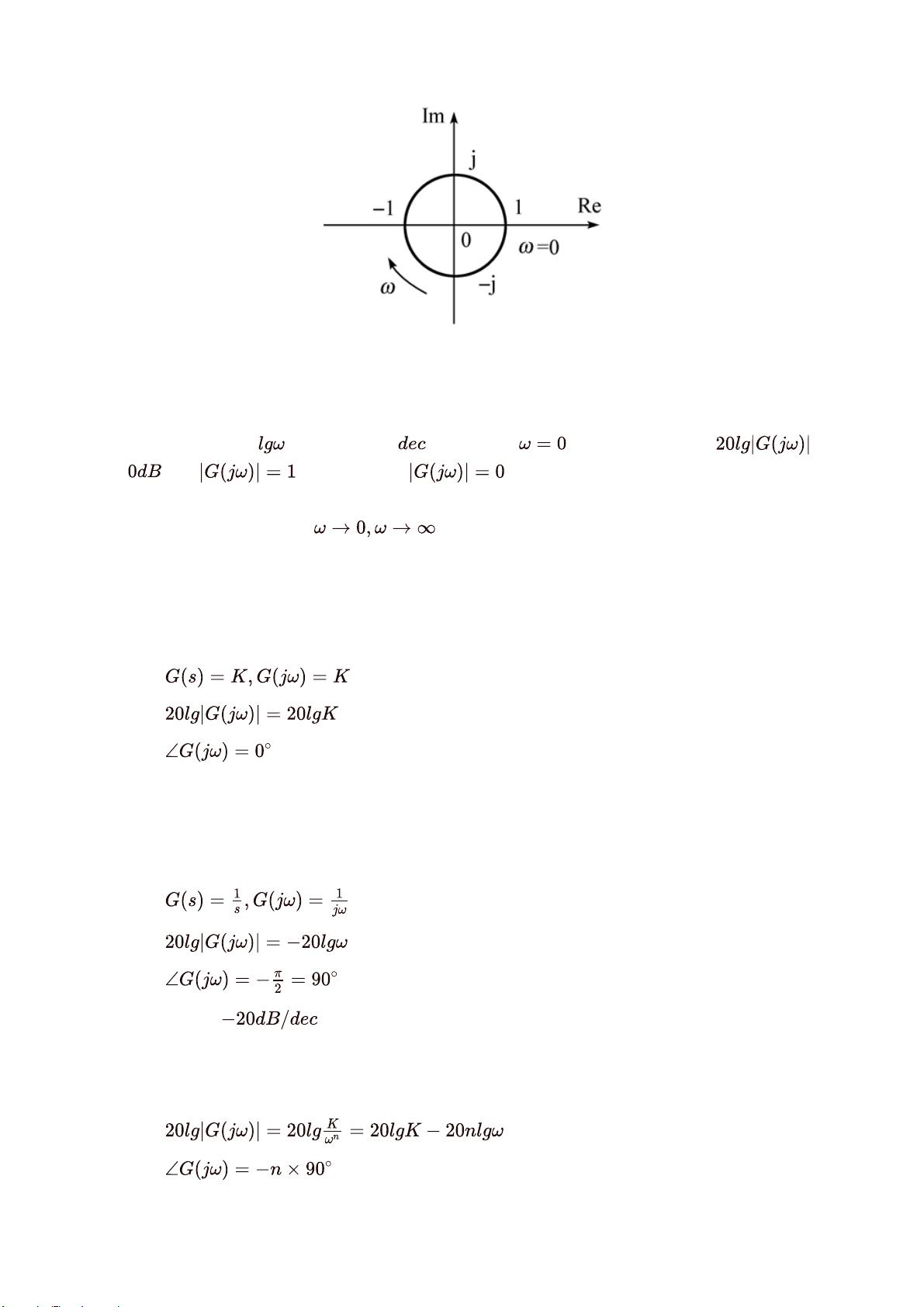
第五章 频率特性法:
频率特性法是另一种重要的分析和设计方法,特别是在工程实践中广泛使用。本章介绍幅频特性和相频特性,以及它们如何反映系统的稳定性和动态性能。Nyquist图和Bode图是频率特性法的主要工具,通过它们可以直观地评估系统的稳定性裕度和相位裕度,进而进行控制器的优化设计。
以上各章内容构成了自动控制原理的基础,不仅涵盖了控制系统的基本概念和分析方法,还涉及了实际设计中的关键步骤。通过深入学习和理解这些知识点,读者将能够对自动控制系统有全面而深入的认识,为进一步研究和应用自动化技术打下坚实的基础。
 自控pdf.rar (5个子文件)
自控pdf.rar (5个子文件)  第四章 根轨迹法.pdf 279KB 第二章 系统的数学模型.pdf 260KB 第一章 自动控制概述.pdf 115KB 第五章 频率特性法.pdf 744KB 第三章 控制系统的时域分析法.pdf 792KB
第四章 根轨迹法.pdf 279KB 第二章 系统的数学模型.pdf 260KB 第一章 自动控制概述.pdf 115KB 第五章 频率特性法.pdf 744KB 第三章 控制系统的时域分析法.pdf 792KB135 浏览量
168 浏览量
2019-05-11 上传
145 浏览量
2010-09-04 上传
123 浏览量
2021-10-22 上传
2021-10-11 上传
190 浏览量
资源评论


Mr.Hazyzhao
- 粉丝: 294
- 资源: 2









最新资源
- 基于web的中小型企业医药管理系统.doc
- PM产品管理流程总结整理
- 基于web的大学生社团平台的开发与实现论文.doc
- 基于SSM框架的建筑市场监管与诚信信息发布平台.doc
- Delphi 12 控件之Dism++10.1.1002.1B.rar
- 自动化水洗标机sw18可编辑全套技术资料100%好用.zip
- photocc2020处理不了webp文件插件
- 跑步社区界面管理系统基于Struts2技术的设计与实现
- 基于struts和hibernate的手机销售系统的设计与实现论文.doc
- 山东大学编译原理期末复习-概念汇总
- 基于web的畅读小说管理系统设计论文.doc
- 基于Web的电影点评系统分析与设计-提高用户观影选择及影院管理效率的JSP开发
- 基于web的房屋出租管理系统的设计与实现.doc
- 基于web的老年公寓管理平台的设计与实现.doc
- 基于web的农产品销售管理系统
- 基于web的人才招聘网站论文 .doc
