
v-rep(virtual Robot Experimentation Platform)
简介:
具有集成开发环境的机器人模拟器 V-REP 以分布式控制结构为基础: 每个对象或模
型都是可以通过嵌入式脚本,插件,ROS 平台,远程 API 客户端或自定义的解决方案等
单 独 控 制 。 V-REP 用 途 很 广 , 适 用 于 多 机 器 人 应 用 。 可 以 用 C / C +
+,Python,Java, Lua,Matlab,Octave 或 Urbi 编写机器人控制程序
一、导入三维模型——PUMA560 机械臂
分为几个步骤:
1、建立、得到模型
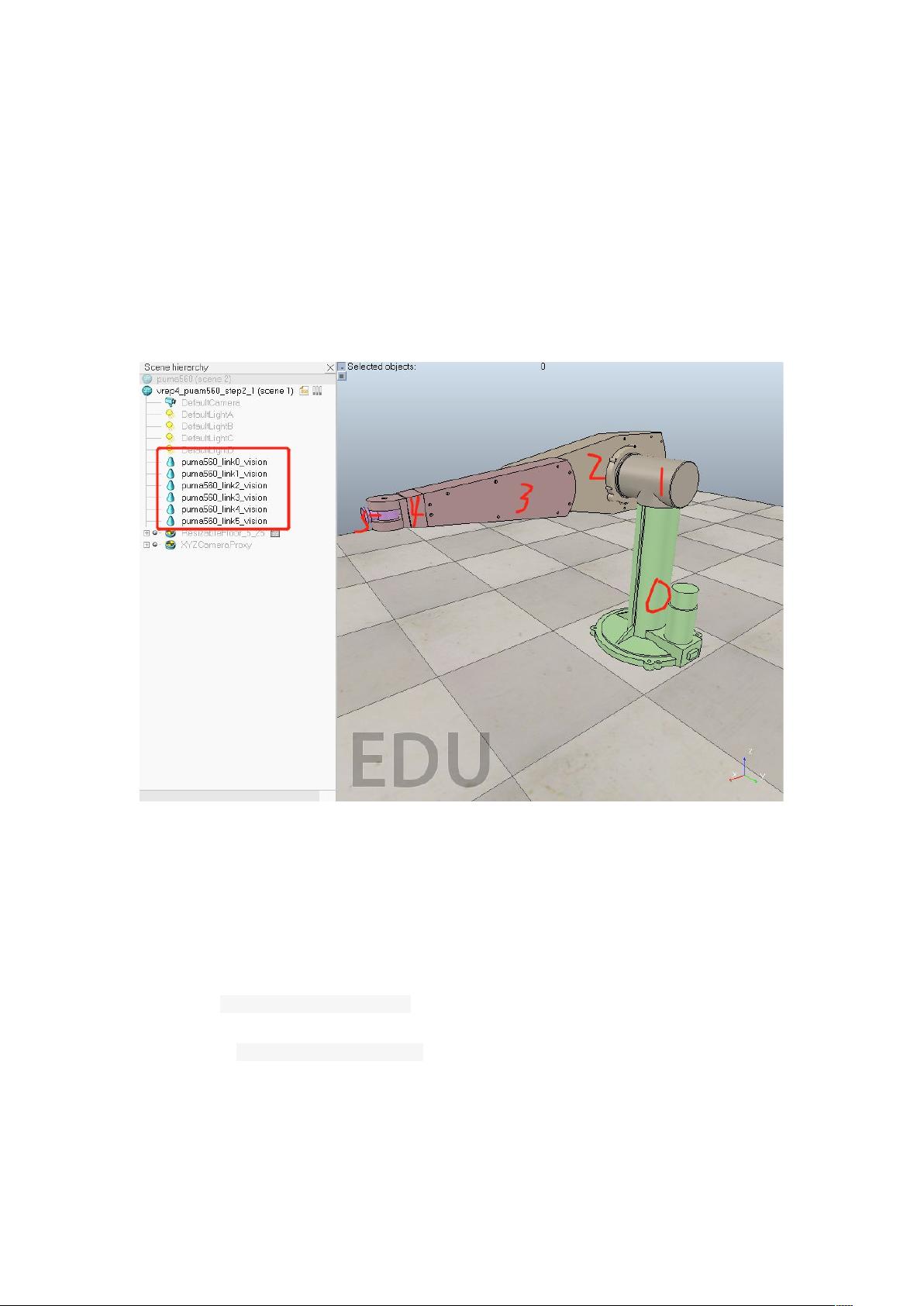
2、导入模型并进行简单的处理
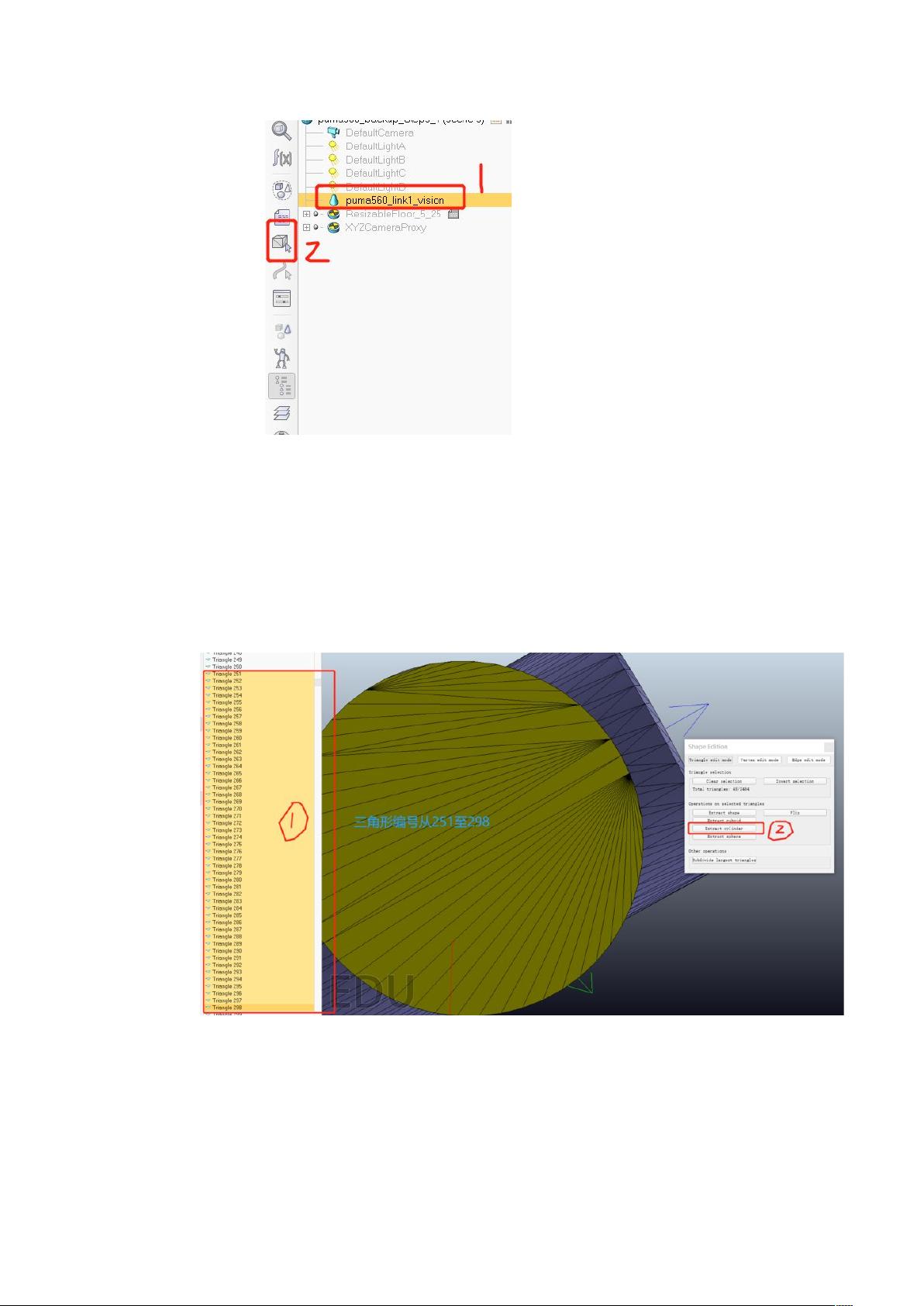
3、提取关键特征,添加运动关节
4、提取实体特征
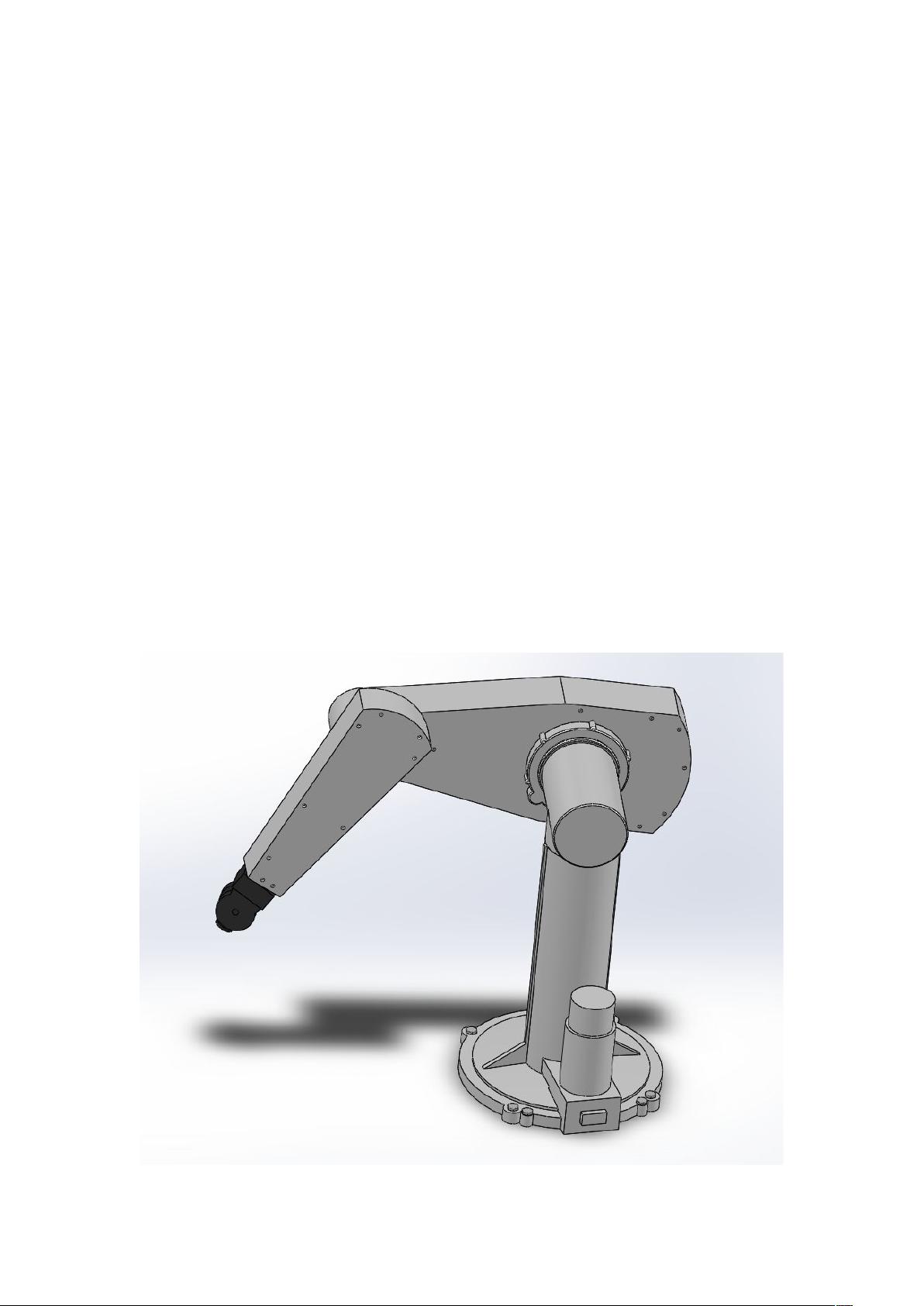
Step1 准备工作(建立、得到模型)
1、首先在建模软件中建立机械臂模型, V-REP 目前支持以下的 CAD 数据 格式:
OBJ,STL,DXF,3DS(仅限 Windows)和 Collada(COLLADA™ 是面向交互式 3D
应用程序的基于 XML 的数字资产交换方案,使 3D 创作应用程序可以自由地交换数字资产
而不损失信息)。也支持 URDF(统一机器人描述格式)
剩余13页未读,继续阅读
资源评论


沙漠中的鸡翅膀
- 粉丝: 2
- 资源: 6









最新资源
- Java源码ssm框架的大学生兼职系统-毕业设计论文-期末大作业.rar
- Java源码ssm框架的弹幕视频网站-毕业设计论文-期末大作业.rar
- Java源码ssm框架的定西扶贫惠农推介志愿者系统-毕业设计论文-期末大作业.rar
- Java源码ssm框架的电子药品商城系统-毕业设计论文-期末大作业.rar
- Java源码ssm框架的东理咨询交流论坛-毕业设计论文-期末大作业.rar
- 灰狼算法求解函数,MATLAB代码
- Java源码ssm框架的二手车交易网站-毕业设计论文-期末大作业.rar
- Java源码ssm框架的二手交易平台-毕业设计论文-期末大作业.rar
- Java源码ssm框架的二手手机回收平台-毕业设计论文-期末大作业.rar
- Java源码ssm框架的房屋租赁系统-合同-毕业设计论文-期末大作业.rar
- Java源码ssm框架的高校毕业生就业满意度调查-毕业设计论文-期末大作业.rar
- Java源码ssm框架的高校二手交易平台-毕业设计论文-期末大作业.rar
- 数学实验中MATLAB的应用技巧与实例解析
- Java源码ssm框架的高校信息资源共享平台-毕业设计论文-期末大作业.rar
- Java源码ssm框架的高校校园点餐订餐系统-毕业设计论文-期末大作业.rar
- Java源码ssm框架的个人交友网站-毕业设计论文-期末大作业.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


