机器人智能控制实验一
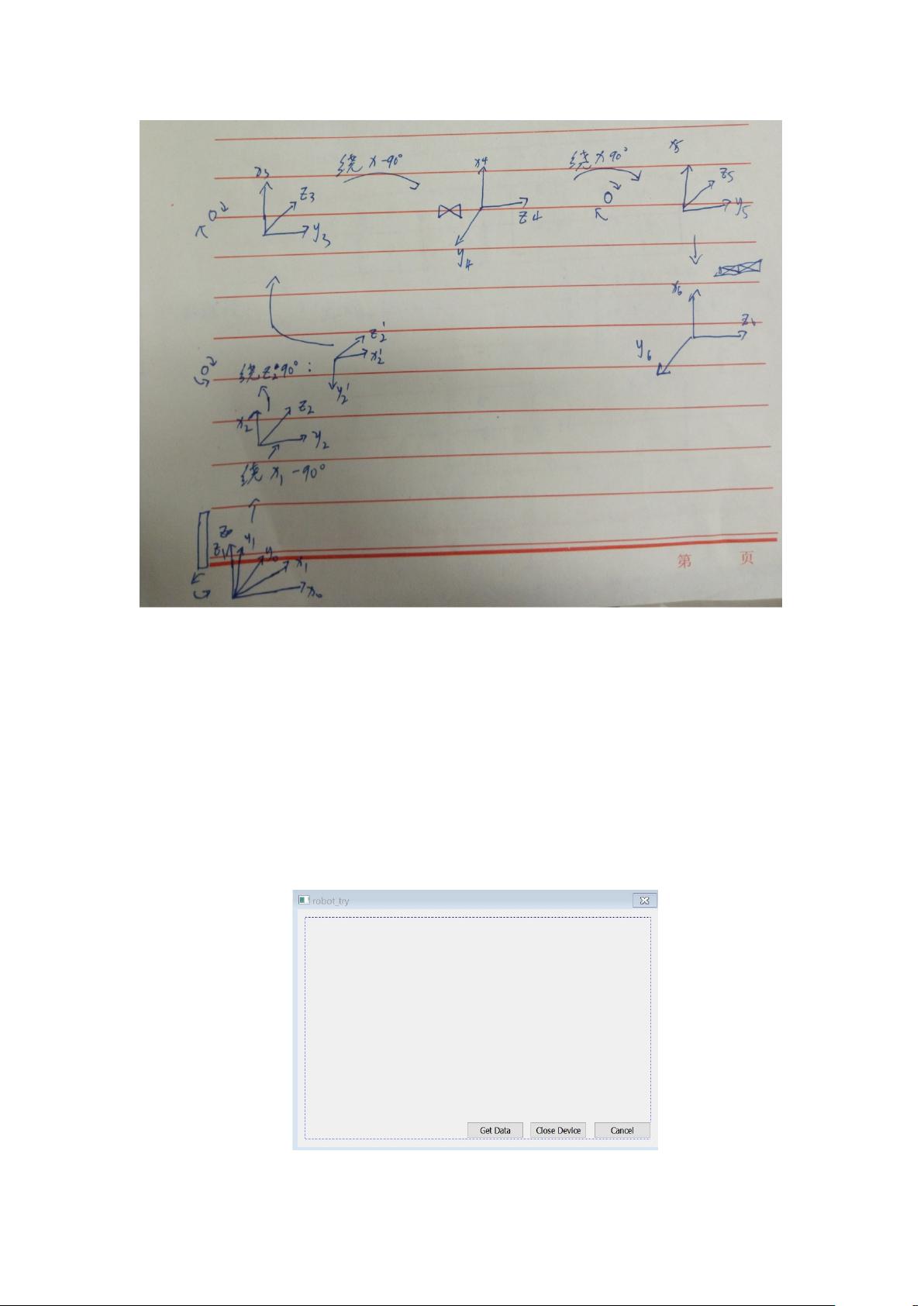
一.对 HP3 机器人用 D-H 方法建立连杆坐标系,并列些 D-H 参数: (汤志强)
HP3 机器人 D-H 参数:
Theta d a Alpha
0 0 1 -pi/2
0 0 2.9 0
0 0 0.85 -pi/2
0 3 0 pi/2
0 0 0 -pi/2
0 0 0 0
 report.zip (8个子文件)
report.zip (8个子文件)  report
report  P60321-232557.jpg 1.5MB
P60321-232557.jpg 1.5MB MOTOMAN_IKENE.m 2KB MOTOMAN_MODIFIED_finalVersion.m 580B
MOTOMAN_IKENE.m 2KB MOTOMAN_MODIFIED_finalVersion.m 580B ~$port_zhiqiang.docx 162B PULSE_ANGLE_CONV.m 191B Thumbs.db 12KB
~$port_zhiqiang.docx 162B PULSE_ANGLE_CONV.m 191B Thumbs.db 12KB modul.bmp 414KB report_zhiqiang.docx 1.58MB
modul.bmp 414KB report_zhiqiang.docx 1.58MB