277
CHAPTER
15
EQUATION 15-1
Equation of the moving average filter. In
this equation, is the input signal, isx[ ] y[ ]
the output signal, and M is the number of
points used in the moving average. This
equation only uses points on one side of the
output sample being calculated.
y[i] '
1
M
j
M &1
j'0
x [i %j ]
y [80] '
x [80] % x [81] % x [82] % x [83] % x [84]
5
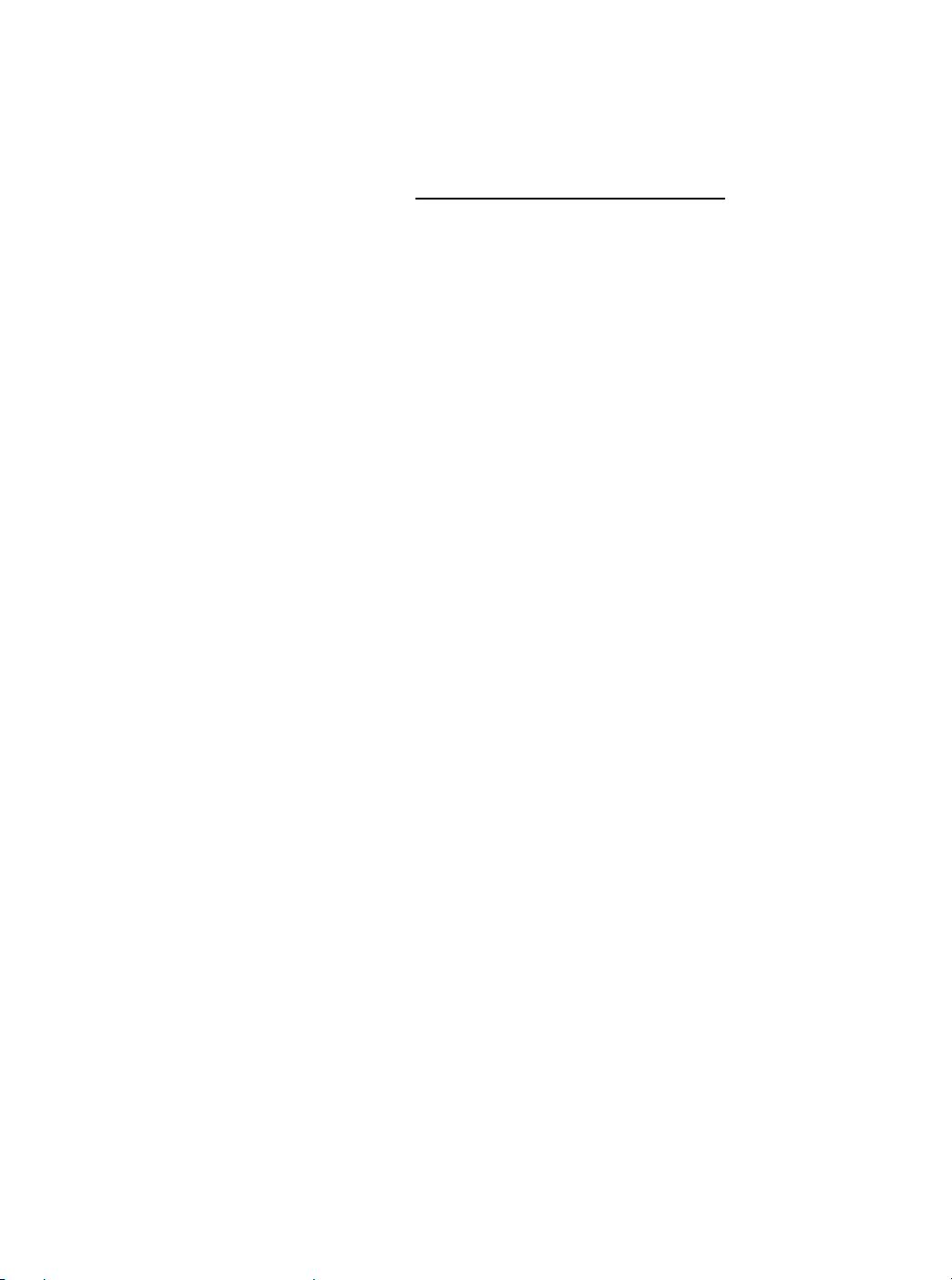
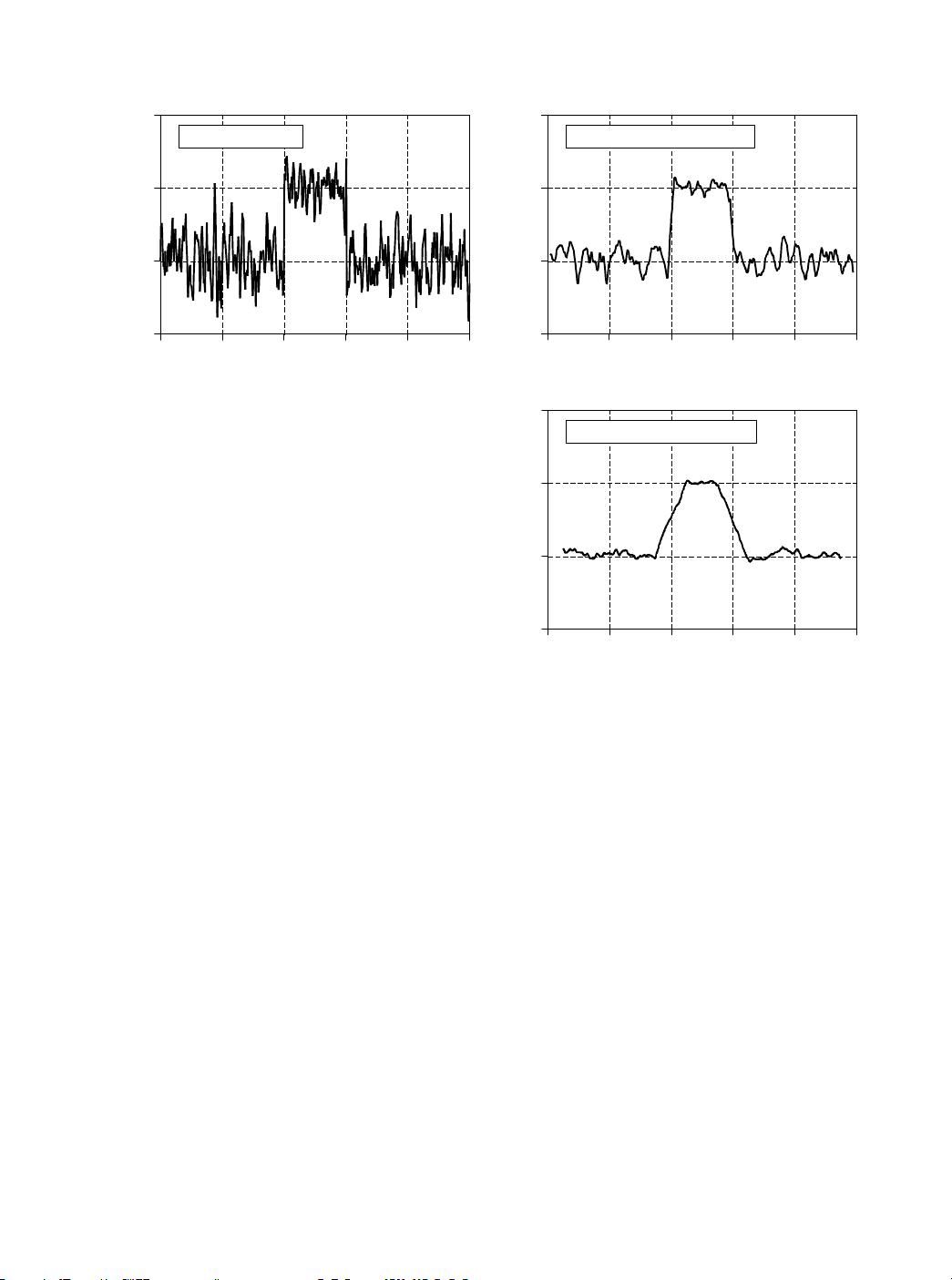
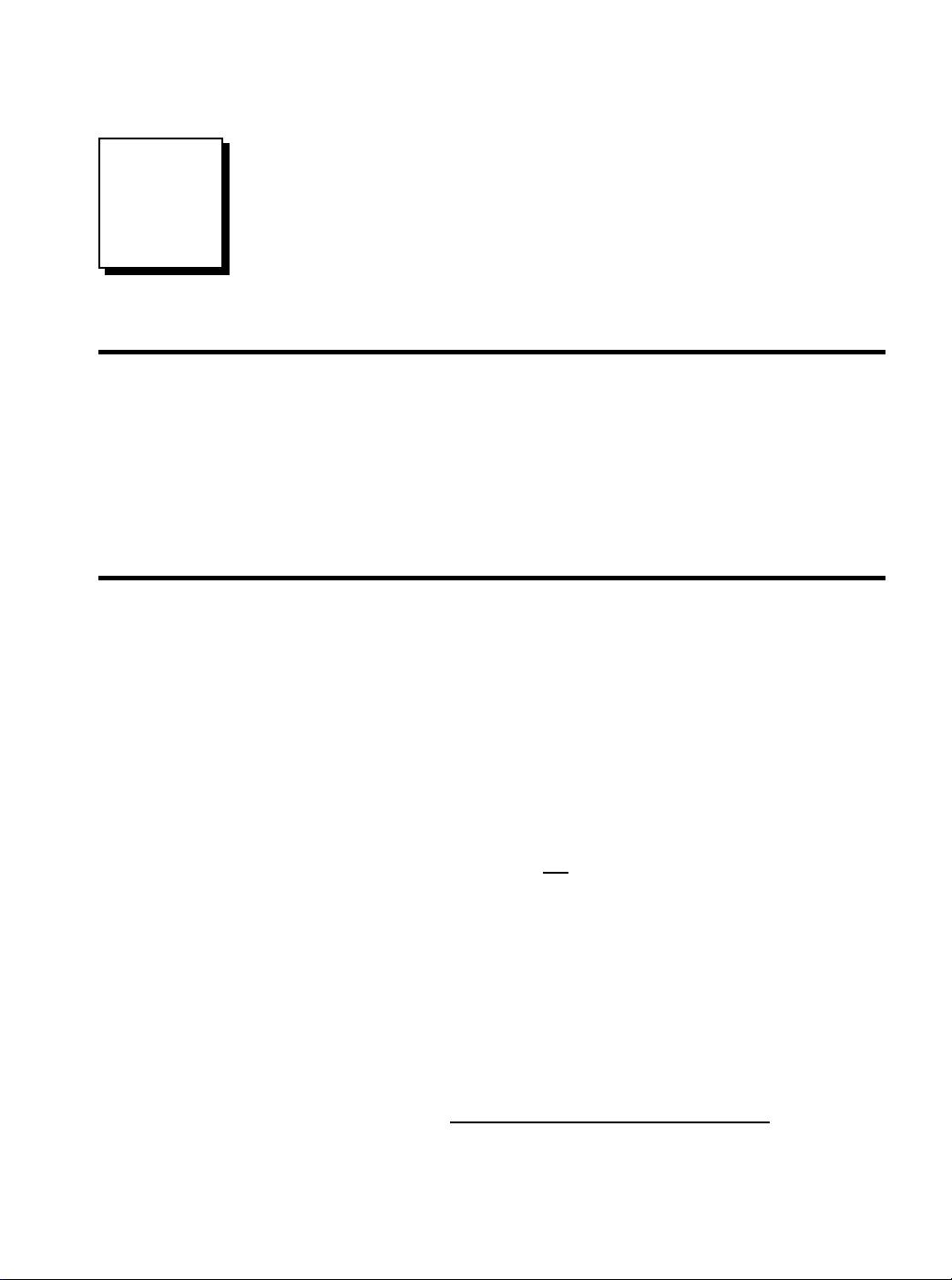
Moving Average Filters
The moving average is the most common filter in DSP, mainly because it is the easiest digital
filter to understand and use. In spite of its simplicity, the moving average filter is optimal for
a common task: reducing random noise while retaining a sharp step response. This makes it the
premier filter for time domain encoded signals. However, the moving average is the worst filter
for frequency domain encoded signals, with little ability to separate one band of frequencies from
another. Relatives of the moving average filter include the Gaussian, Blackman, and multiple-
pass moving average. These have slightly better performance in the frequency domain, at the
expense of increased computation time.
Implementation by Convolution
As the name implies, the moving average filter operates by averaging a number
of points from the input signal to produce each point in the output signal. In
equation form, this is written:
Where is the input signal, is the output signal, and M is the numberx[ ] y[ ]
of points in the average. For example, in a 5 point moving average filter, point
80 in the output signal is given by: