



基于Dspace的CAN通信
2
a Dspace相关概念
b 基于Dspace搭建流程
c Dspace RTICAN具体应用
3
RCP
在开发的初期阶段,快速地建立控制对象及控制器模型,并对整个控制系统进行
多次的、离线的及在线的试验来验证控制系 统软、硬件方案的可行性。这个过程
称之为快速控制原型(RCP)。
这个过程就是等同于在Simulink中搭建了模型,然后离线仿真。
RCP中dSPACE实现了控制器的作用

4
HILS: Hardware in the Loop Simulation -硬件在回路仿真
在完成控制器设计后,在投放市场前必须对其进行详细的测试。如果按传统的
测试方法,用真实的对象或环境进行测试,无论是人员、设备还是资金都需要较大的
投入,而且周期长,不能进行极限条件下的测试,试验的可重复性差,所得测试结果
可记录性及可分析性都较差。现在普遍采用的方法是:在产品上市之前,采用真实的
控制器,被控对象或者系统运行环境部分采用实际的物体,部分采用实时数字模型来
模拟,进行整个系统的仿真测试,这个过程我们称之为硬件在回路仿真(HILS)。
HILS中dSPACE实现了某一设备或环境。
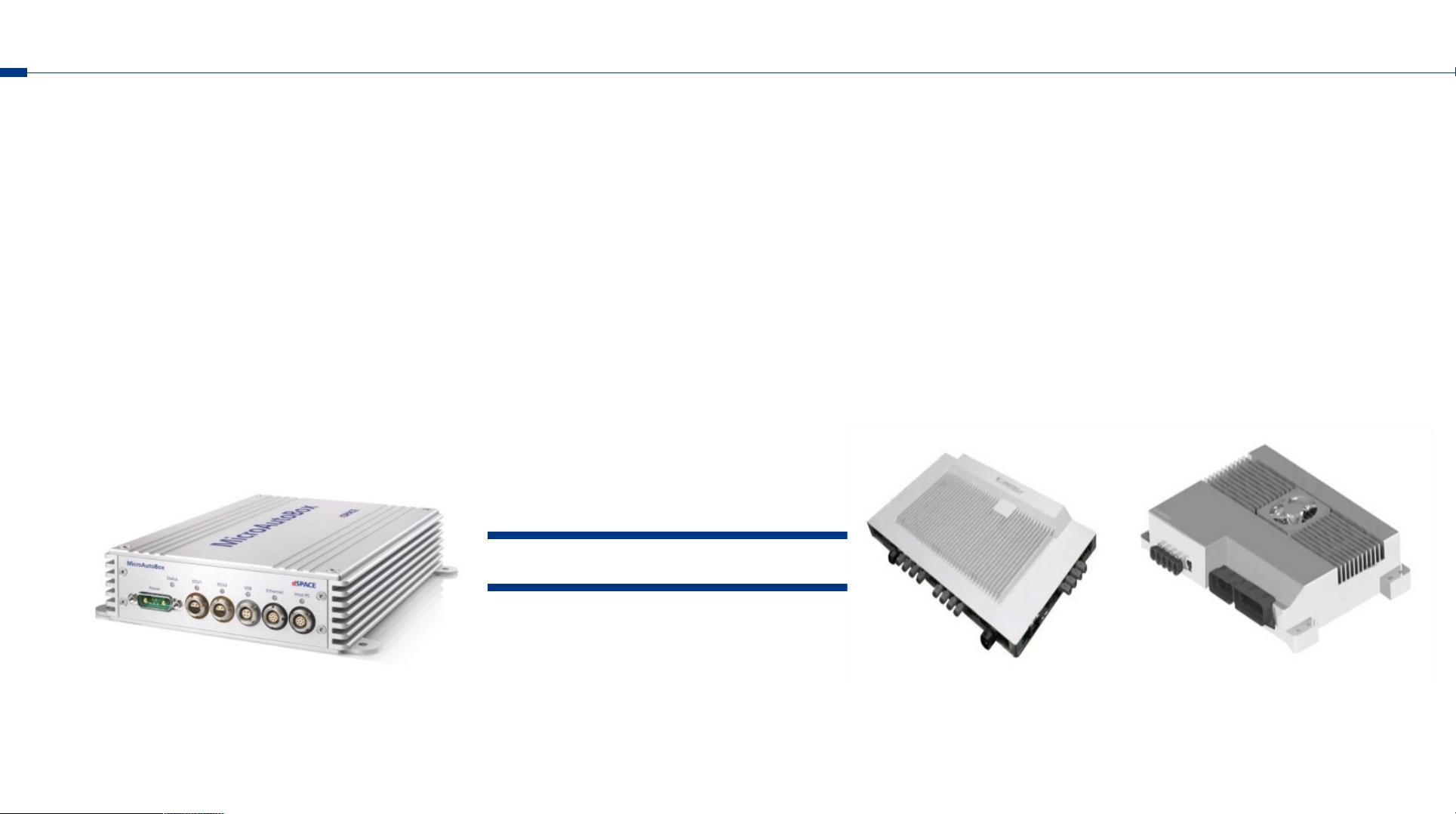
控制器
被控对象
Dspace
HILS
5
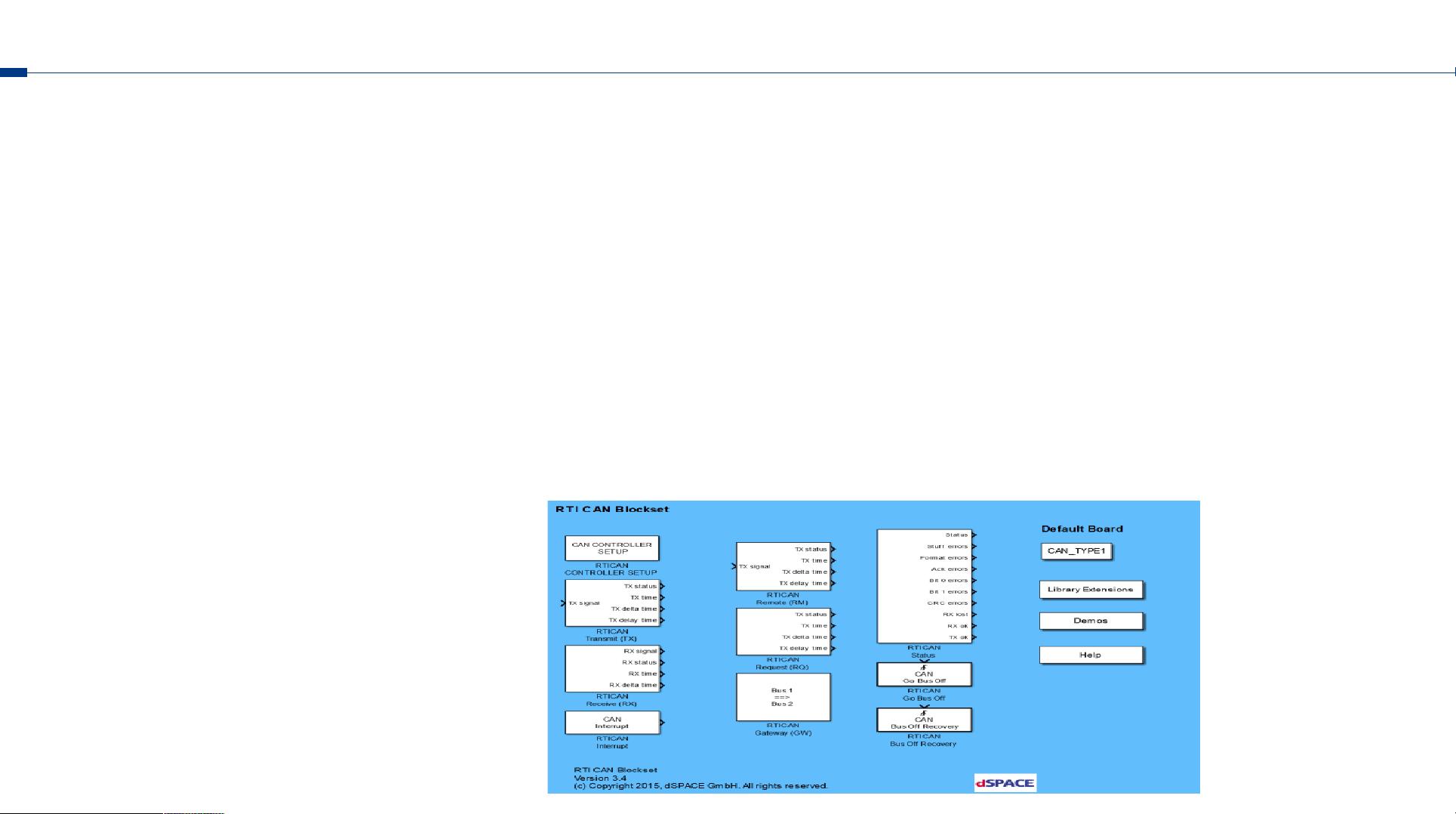
RTI:Real Time Interface -实时交互接口
RTI 是连接dSPACE 实时系统与软件开发工具MATLAB/Simulink 之纽带。利用这
些框图无需编写任何代码就能完成包括I/O 接口及初始化过程的全部设置。同时通
过对RTW 进行扩展,可实现从Simulink 模型到dSPACE 实时硬件代码的无缝自动
下载。这使用户完全致力于实际设计过程并能迅速完成设计的更改,费力的手工编
程已成为过去。
RTI就是对Simulink中的一个库里面包含了很多的元件,用于替换原来Simulink的
I/O口,实现和真实系统连接
RTI













