submitted to EUROGRAPHICS 2008.
1. Introduction
Constructing high-fidelity 3D models of real-world
scenes is an important bottleneck for many computer
graphics applications. The conventional approach of
manual modeling using CAD or animation software
requires artistic talent and a huge time investment.
Automated modeling based on acquiring color and depth
data is a promising alternative.
The typical automated modeling approach is to densely
sample the color and geometry of the scene from several
acquisition viewpoints, and then to merge the datasets to
obtain the scene model. However, dense depth sampling of
complex scenes remains a challenging process that can take
tens of minutes per acquisition viewpoint (e.g. sequential
scanning in laser rangefinding, robust off-line
correspondence computation in depth from stereo, or
sequential light pattern projection in depth from structured
light). This limits acquisition to a few viewpoints.
Unfortunately, even with optimal acquisition viewpoint
planning, complex scenes cannot be adequately sampled
from only a sparse set of viewpoints.
Instead of dense depth sampling from a sparse set of
acquisition viewpoints we propose an automated modeling
approach based on sparse depth sampling from a dense set
of acquisition viewpoints. We show that the sparse per-
viewpoint depth data quickly accumulates to generate
models with superior scene coverage (see Section 4.3).
Moreover, sparse depth can be acquired robustly and
efficiently, which enables an interactive, operator-in-the-
loop, acquisition pipeline. The operator detects and
addresses acquisition problems right away, and aims the
acquisition device such as to maximize the impact of the
sparse data, which ensures that a quality model is obtained
in a single scanning session.
The sparse-depth/dense-viewpoint (SDDV) approach
enables adding detail at linear cost: a quick scan can be
refined at will by revisiting scanned regions in order to
increase model fidelity. This is in sharp contrast with the
dense-depth/sparse-viewpoint (DDSV) approach where,
due to data redundancy, acquisition from each additional
viewpoint comes at the same cost yet contributes fewer and
fewer new samples.
Another important advantage of the SDDV modeling
approach is an increased robustness of the acquisition of
reflective surfaces. Such surfaces are challenging for
passive methods (e.g. stereo) because they complicate
correspondence searching, and also for active methods (e.g.
laser rangefinding, structured light) because they limit the
amount of emitted energy reflected back to the sensor. Our
approach of interactive acquisition from a dense set of
viewpoints allows the operator to avoid grazing scanning
angles.
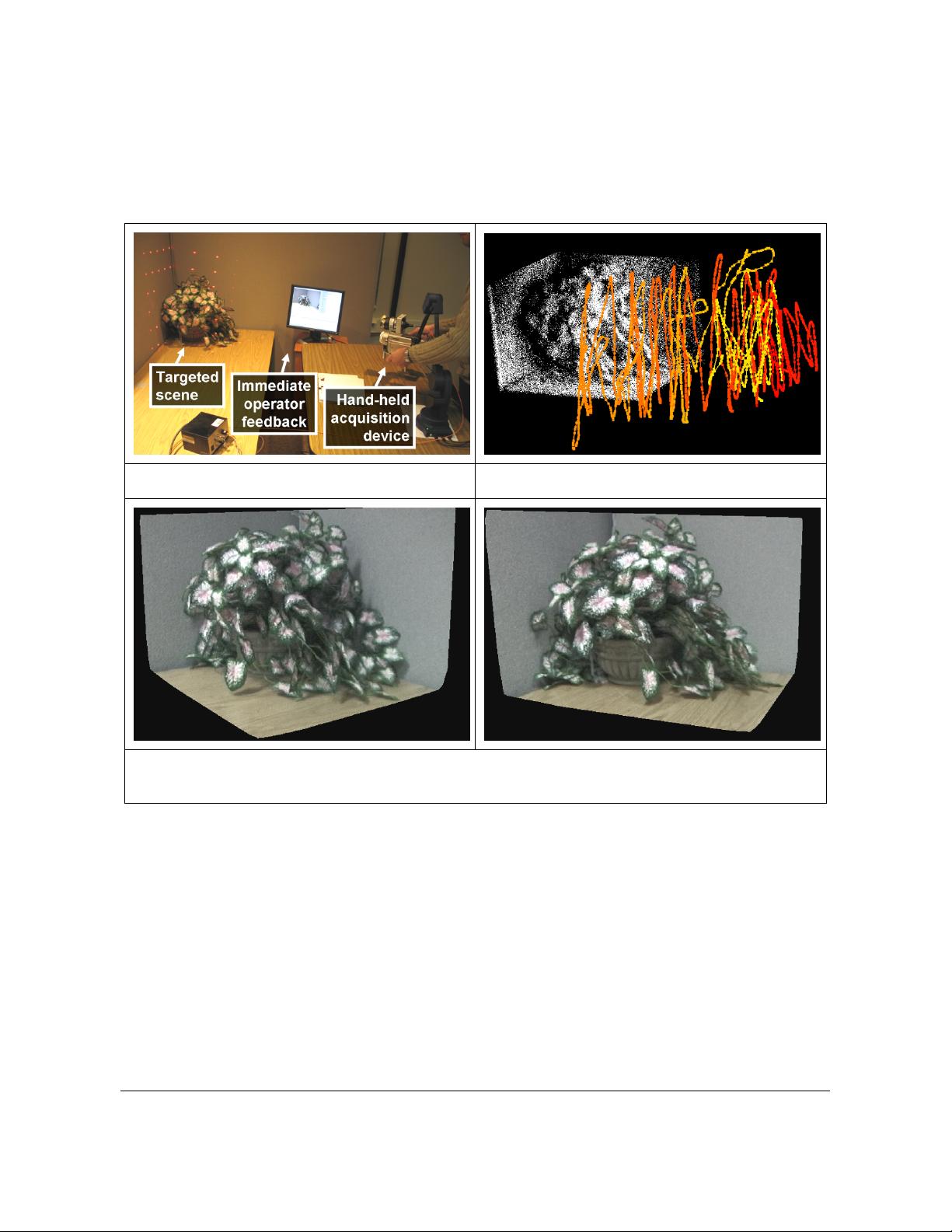
We describe a modeling system that implements the
SDDV modeling approach (Figure 1). The system acquires
the scene from thousands of viewpoints in minutes (Figure
2). The color and depth data is combined into a view
dependent model, which produces quality novel views of
the scene at interactive rates (Figure 3, Figure 10, and
accompanying video). The system is versatile—it supports
complex geometry and surfaces with complex reflective
properties—and robust—all the models shown here were
acquired in a single take in one afternoon. We currently
target scenes that fit in a 0.5m cube. However, the system
has ample depth acquisition range, the resulting models are
compact, and the system does not require altering scene
lighting conditions or displacing scene objects, which are
important pre-conditions for a future extension to SDDV
modeling of large environments.
2. Prior work
We give a brief discussion of prior work organized
according to the method used for depth acquisition.
No-depth methods
One automated modeling approach is to bypass depth
acquisition altogether and to sample the scene color densely
from a dense set of acquisition viewpoints. The resulting
4D ray database (light field [LH96], and lumigraph
[GGS*96]) supports photorealistic rendering at interactive
rates. Light fields and their extensions remain the only
approach for acquiring extremely complex scenes (e.g.
feathers, fur, translucent gaze [MPN*02]). However, the
approach suffers from the disadvantages of large model
sizes. Panoramas [Che95] and their extensions are compact
2D ray databases, but the reduction in size comes at the
price of restricting the desired viewpoint to the center of the
panorama. All ray database methods preclude quantitative
applications that require explicit geometry.
User-specified-depth methods
Another approach is to rely on the user to specify a
coarse geometric model of the scene using an interactive
software tool that leverages model and image space
geometric constraints [DTM96, HH02, QTZ*06]. The
approach takes advantage of the user’s understanding of the
scene, who specifies the most relevant geometric entities.
However, the method scales poorly with the geometric
complexity of the scene, when manual geometry
specification becomes prohibitively expensive.
Dense-depth methods
One of the oldest and most appealing ways of acquiring
scene geometry is depth from stereo, where the disparity of
corresponding points in overlapping photographs is
translated into depth [PG02, DRR03, LHY*05]. A simple
camera suffices to capture scenes on small or large scale,
indoors or outdoors. However, finding correspondences is a
challenging problem, relying on the presence of color
texture.
.