
2017/12/14 增强学习(三)----- MDP的动态规划解法
http://blog.csdn.net/zz_1215/article/details/44138843 1/5
增强学习(三)----- MDP的动态规划解法
转载 2015年03月08日 22:17:00
19628
上一篇我们已经说到了,增强学习的目的就是求解马尔可夫决策过程(MDP)的最优策略,使其在任意初始状态
下,都能获得最大的V 值。(本文不考虑非马尔可夫环境和不完全可观测马尔可夫决策过程(POMDP)中的增强学
习)。
那么如何求解最优策略呢?基本的解法有三种:
动态规划法(dynamic programming methods)
蒙特卡罗方法(Monte Carlo methods)
时间差分法(temporal difference)。
动态规划法是其中最基本的算法,也是理解后续算法的基础,因此本文先介绍动态规划法求解MDP。本文假设拥
有MDP模型M=(S, A, P , R)的完整知识。
1. 贝尔曼方程(Bellman Equation)
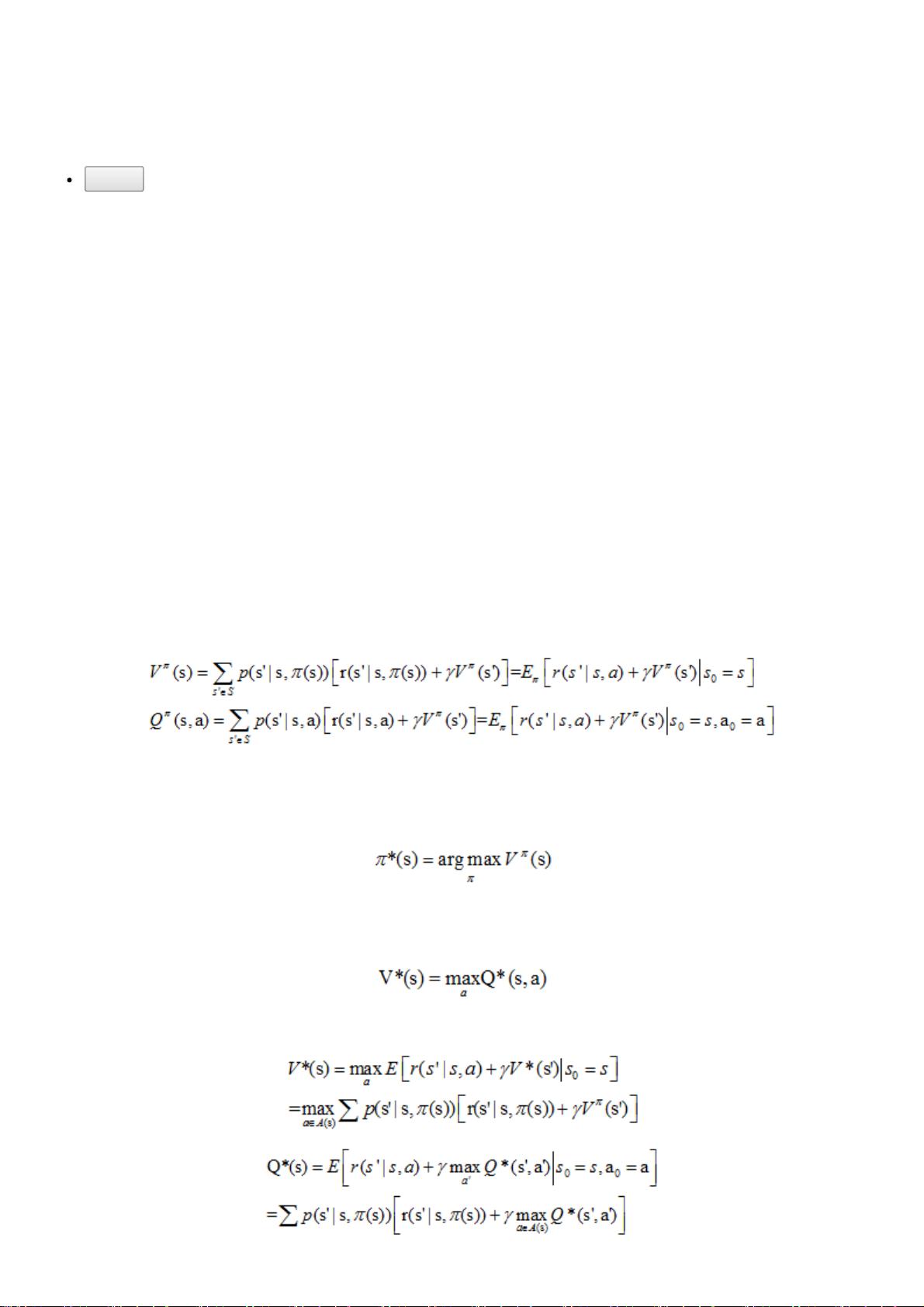
上一篇我们得到了V 和Q 的表达式,并且写成了如下的形式
在动态规划中,上面两个式子称为贝尔曼方程,它表明了当前状态的值函数与下个状态的值函数的关系。
优化目标π*可以表示为:
分别记最优策略π*对应的状态值函数和行为值函数为V*(s)和Q*(s, a),由它们的定义容易知道,V*(s)和Q*
(s, a)存在如下关系:
状态值函数和行为值函数分别满足如下贝尔曼最优性方程(Bellman optimality equation):
π
sa
π π






评论0
最新资源