

arXiv:1312.2372v2 [stat.CO] 28 Feb 2017
PREPRINT: IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 62, NO. 24, PP. 6554–6567, 2014 1
Labeled Random Finite Sets and the Bayes
Multi-Target Tracking Filter
Ba-Ngu Vo
∗
, Ba-Tuong Vo
†
, Dinh Phung
‡
Abstract—An analytic solution to the multi-target Bayes re-
cursion known as the δ-Generalized Lab eled Mul ti-Bernoulli (δ-
GLMB) filter has been recently proposed in [1]. As a sequel
to [1], this paper details efficient implementations of the δ-
GLMB multi-target tracking filter. Each iteration of this filter
involves an update operation and a prediction operation, both of
which result in weighted sums of multi -target exponentials with
intractably large number of terms. To truncate these sums, the
ranked assignment and K-th shortest path algorithms are used
in the update and prediction, respectively, to determine the most
significant terms without exhaustively computing all of the terms.
In addition, using tools derived from the same framework, such
as probability hypothesis density filtering, we present inexpensive
(relative to the δ- GLMB filter) look-ahead strategies to reduce
the number of computations. Characterization of the L
1
-error in
the multi-target density arising from the truncation is presented.
Index Terms—Random finite set, marked point process, con-
jugate prior, Bayesian estimation, target tracking.
I. INTRODUCTION
Multi-target filtering involves the on-line estimation of an
unknown and time-varying number of targets and their individ-
ual states from a sequence of observations [2]–[4]. While the
term multi-target filtering is often used interchangeably with
multi-target tracking , there is a subtle difference. In multi-
target tracking we are a lso interested in the trajectories of
the targets (indeed, real multi-target tracking systems require
track labels). This work is concerne d with a Bayesian multi-
target filtering solution that also provides estimates of target
trajectories, hence the nam e multi-target tracking filter.
The key challenges in multi-target filtering/tracking include
detection uncertainty, clutter, and data association uncer-
tainty. To da te , three m a jor approaches to multi-target track-
ing/filtering have em erged as the main solution paradigms.
These a re, Multiple H ypotheses Tracking (MHT), [2], [5]–
[7], Joint Probabilistic Data Association (JPDA) [2], [4], and
Random Finite Set (RFS) [3].
The ran dom finite set (RFS) approach pr ovides an ele-
gant Bayesian formulation of the mu lti- ta rget filtering/tracking
problem in which the collection of target states, refer red to as
Acknowledgement: This work is supported by the Australian Research
Council under the Future Fellowship FT0991854 and Discovery Early Career
Researcher Award DE120102388
B.-N. Vo and B.-T. Vo are with the Department of Electrical and Com-
puter Engineering, Curtin University, Bentley, WA 6102, Australia (email:
{ba-ngu,ba-tuong}.vo@curtin.edu.au). D. Phung is with the Faculty of Sci-
ence, Engineering & Built Environment, Deakin University, Geelong, VIC
3220, Australia (email: dinh.phung@deakin.edu.au)
the multi-target state, is tr eated as a finite set [3], [8]. The ra-
tionale beh ind this representatio n traces back to a fundamental
consideration in estimation theory–estimation error [9]. This
mathematical framework subsequently became a very popular
multi-target estimation method with applications in sonar [10],
computer vision [11], [12], [13], [14], field rob otics [15], [16],
[17], [18], [19] traffic monitoring [20], [21], [22], cell biology
[23], [13], [24], sensor network and distributed estimation [ 25],
[26], [27], [28] etc.
The centerpiece o f the RFS ap proach is the Bayes m ulti-
target filter [3], which recursively pr opagates the filtering
density of the multi-target state forward in time. This filter
is also a (multi-target) tracker when target identities or labe ls
are incor porated into individual ta rget states. Due to the nu-
merical complexity of Bayes multi-target filter, the Probability
Hypothesis Density (PHD) [8], Cardinalized PHD (CPHD)
[29], and multi-Bernoulli filters [30], [9] have be e n developed
as approximations. These filters, in principle, are not multi-
target trackers b ecause they rest on the premise that targets
are indistinguishable.
In [1], [31], the notion of labeled RFSs is introduc ed to
address target trajectories and their uniqueness. The key results
include conjugate priors that are closed under the Chapman-
Kolmogorov equation, and an analytic solution to the Bayes
multi-target trackin g filter known as the δ-generalized labeled
multi-Berno ulli (δ-GLMB) filter. Although a simulation result
was presented to verify the solution, specific implementation
details were not given.
As a sequel to [1], the aim of this paper is to complement
its theoretical co ntributions with practical algorithms that will
facilitate the development of applications in signal processing
and related fields. In pa rticular, we p resent an efficient and
highly parallelizable implementation of the δ-GLMB filter.
Each iteration o f the δ-GLMB filter involves multi-target filter-
ing and predictio n densities that are weighted sums of multi-
target exponentials. While these sums are expre ssible in closed
forms, the number of terms g rows super-exponentially in time.
Furthermore, it is not tractable to exhau stively compute all the
terms of the multi- ta rget densities first and then truncate by
discarding those deemed insig nificant.
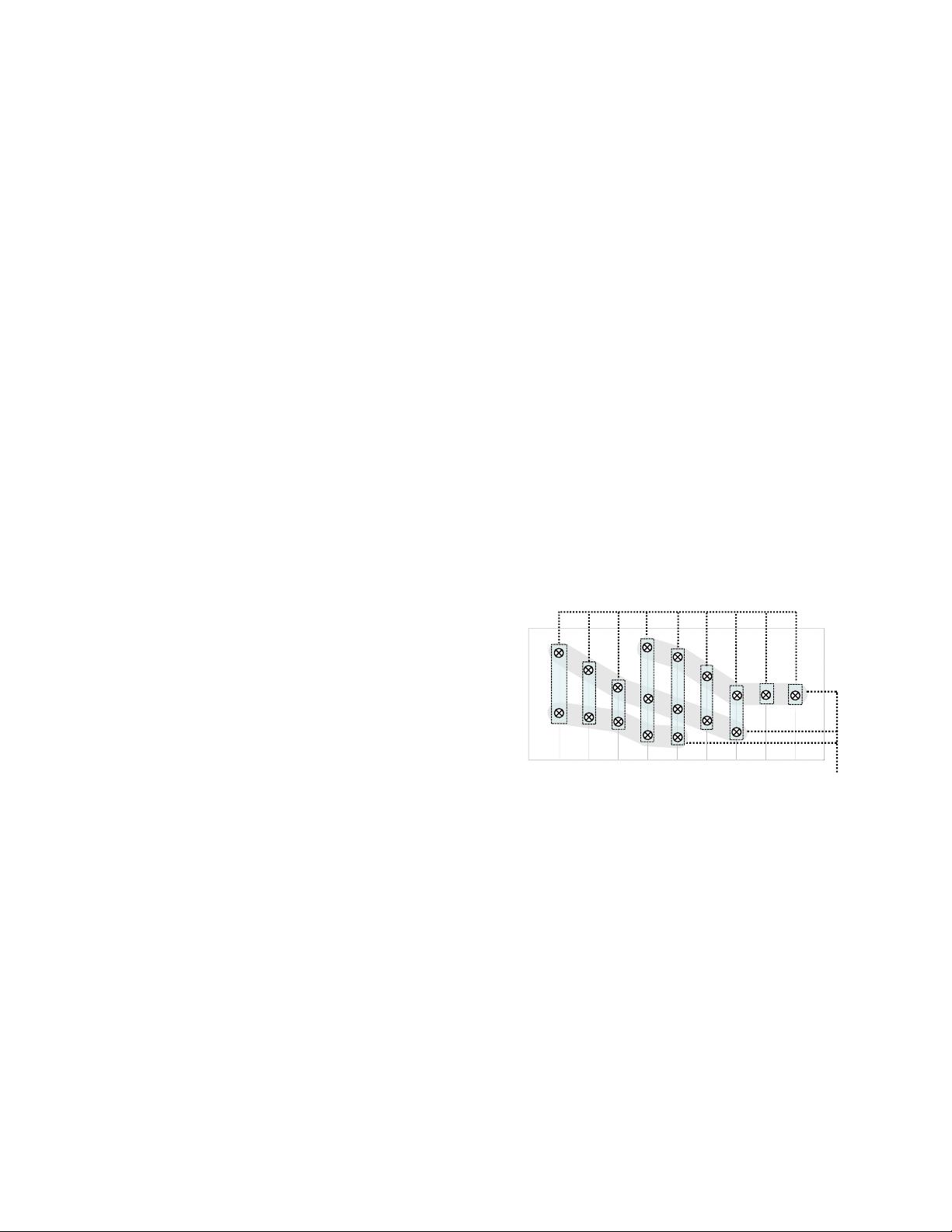
The key innovation is the truncation of the multi-ta rget
densities without exhaustively computing all th eir components.
The multi-target filtering and p rediction densities are truncated
using the ranked assignment and K-shortest paths algorithms,
respectively. Techniques such as PHD filtering are used as
inexpensive look-ahead strategies to drastically r educe the
number of calls to ranked assignment and K-shortest paths
algorithm s. Moreover, w e establish that truncation by discard-
剩余12页未读,继续阅读
资源评论


weixin_38918256
- 粉丝: 0
- 资源: 1









最新资源
- C#微信营销平台源码 微信营销后台管理系统源码数据库 文本存储源码类型 WebForm
- 技术资料分享65C02汇编指令集很好的技术资料.zip
- 课程作业《用51单片机实现的红外人体检测装置》+C语言项目源码+文档说明
- app自动化小白之appium环境安装
- 课程设计-哲学家就餐问题(并发算法问题)-解决策略:资源分级、最多允许四个哲学家同时拿筷子、服务员模式、尝试等待策略
- C#大型公司财务系统源码 企业财务管理系统源码数据库 SQL2008源码类型 WebForm
- MDK文件编译配套工程
- java项目,课程设计-ssm企业人事管理系统ssm.zip
- ton区块链func语言web3智能合约入门课程
- java项目,课程设计-ssm-框架的网上招聘系统的设计与实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


