
基于基于HCSl2的小车智能控制系统设计的小车智能控制系统设计
摘要摘要 基于HCSl2单片机设计一种智能车系统。在该系统中,由红外光电传感器实现路径识别,通过对小车速度的控制,使小
车能按照任意给定的黑色引导线平稳地寻迹。实验证明:系统能很好地满足智能车对路径识别性能和抗干扰能力的要求,速度
调节响应时间快,稳态误差小,具有较好的动态性能和良好的鲁棒性。
关键词关键词 智能车 HCSl2单片机 红外光电传感器
智能车系统以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科;
主要由路径识别、角度控制及车速控制等功能模块组成。一般而言,智能车系统要求小车在白色的场地上,通过控制小车的转
向角和车速,使小车能自动地沿着一条任意给定的黑色带状引导线行驶。
笔者基于HCSl2单片机设计了一种智能车系统。硬件系统中的路径识别功能由红外光电传感器实现,车速控制由模糊控制器
进行调节。软件设计中实时检测路况,并定时中断采集速度反馈值。
1 系统分析及控制方案系统分析及控制方案
1..1 智能车系统分析智能车系统分析
智能车系统根据检测到的路况和车速的当前信息,控制转向舵机和直流驱动电机,相应地调整小车的行驶方向和速度;最
终的目的是使智能车能快速、稳定地按给定的黑色引导线行驶。
小车在行驶过程中会遇到以下两种路况:①当小车由直道高速进入弯道时,转角方向和车速应根据弯道的曲率迅速做出相应
的改变,原则是弯道曲率越大则方向变化角度越大,车速越低。②当小车遇到_卜字交叉路段或是脱离轨迹等特殊情况时,智
能车应当保持与上次正常情况一致的方向行驶,速度则相应降低。因此,对智能车的设计,要求具有实时路径检测功能和良好
的调速功能。
1..2 控制方案的设计控制方案的设计
系统的控制分为小车转向角控制和速度控制两部分。
小车转向角的控制通过输入PWM信号进行开环控制。根据检测的不同路径,判断出小车所在位置,按不同的区间给出不同
的舵机PWM控制信号。小车转过相应的角度。考虑到实际舵机的转向角与所给PWM信号的占空比基本成线性关系,所以舵机
的控制方案采用查表法。在程序中预先创建控制表,路径识别单元检测当前的路况,单片机通过查表可知当前的赛道,然后给
出相应的PWM信号控制舵机转向。
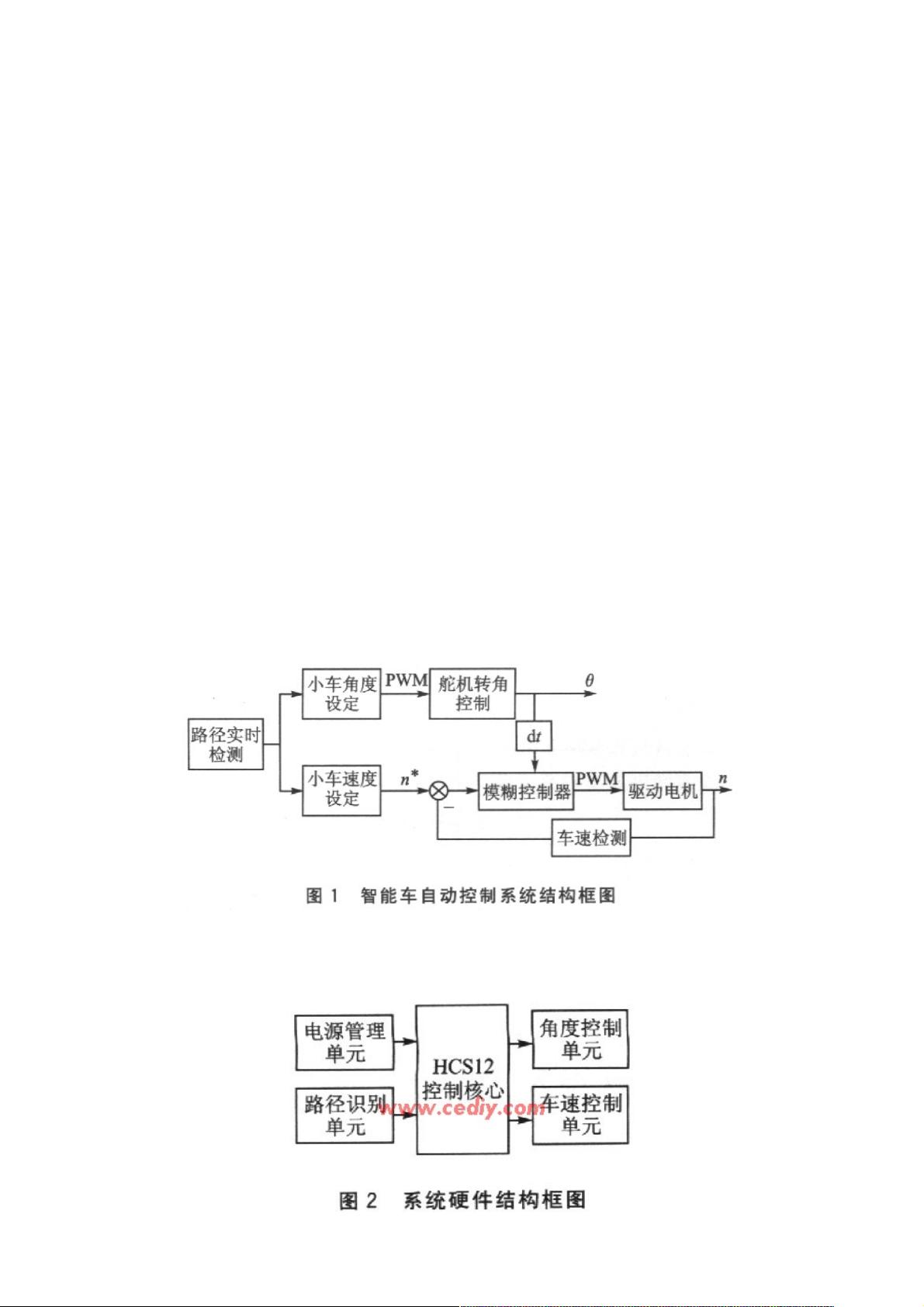
本设计采用了一种参数自整定的模糊控制算法对小车速度进行闭环控制。小车在前进过程中,根据不同的路况给出不同的
速度给定值,通过模糊控制器进行速度调节,以缩短小车的速度控制响应时间,减小稳态误差。系统将小车的角度变化率反馈
给模糊控制器,通过修正规则进行模糊参数的自整定。智能车自动控制系统结构框图如图1所示,图中dt表示小车角度的微分
环节,θ表示输出的转角,n’表示速度的设定值,n表示实际速度反馈值。
2 硬件结构与方案设计硬件结构与方案设计
系统硬件主要由HCSl2控制核心、电源管理单元、路径识别单元、角度控制单元和车速控制单元组成,其结构框图如图2所
示。
2..1 HCSl2控制核心控制核心
资源评论


皮卡丘穿皮裤
- 粉丝: 187
- 资源: 955









最新资源
- 基于MPC的永磁同步电机非线性终端滑模控制仿真研究 matlab simulink 无参考文件
- 本科生课程设计封面.doc
- 基于动物群体行为优化的多椭圆检测算法及其在图像处理的应用
- 适用方向:基于LQR控制算法的直接横摆力矩控制(DYC)的四轮独立电驱动汽车的横向稳定性控制研究 主要内容:利用carsim建模,在simulink中搭建控制器,然后进行联合 实现汽车在高速低附着路
- 永磁同步电机模型预测电流控制Simulink仿真,单矢量控制,带一份报告介绍
- Sim-EKB-Install-2024-12-08
- 跟网型逆变器小干扰稳定性分析与控制策略优化simulink仿真模型和代码 现代逆变技术 阻抗重塑 双锁相环 可附赠参考文献(英文) 和一份与模型完全对应的中文版报告
- 冲压废料收集装置sw18可编辑全套技术资料100%好用.zip
- 【西门子1500吉利(柯马)汽车SICAR项目程序源码】西门子PLC&HMI整套设计资料(源码+注释) 西门子1500 PLC, TP1200触摸屏HMI 非常标准的汽车行业程序(SICAR),修改套
- C++ 基于opencv 4.5 仿halcon 基于形状的模板匹配 ,支持目标缩放以及旋转,支持亚像素精度,源码,支持C#
- 深度学习技术中混沌时间序列预测-基于LSTM、Transformer与CNN的多专家混合模型应用-含详细代码及解释
- 双馈风机惯性控制+下垂控制参与系统一次调频的Matlab Simulink模型,调频结束后转速回复,造成频率二次跌落 系统为三机九节点模型,所有参数已调好且可调,可直接运行,风电渗透率19.4% 风机
- iOS 7.0 ~ 16.7 DeviceSupport.zip
- 软件工程期末复习总结.xmind
- Kriging代理模型 克里金模型 回归预测 根据样本数据建立代理模型,进行预测 Matlab编程
- 高速永磁同步电机的电磁设计 高速永磁电机的体积远小于同等功率的中低速电机,且功率密度高,近年来得到了广泛的发展,在离心压缩机、新能源汽车、航空航天、医疗器械等领域备受青睐 但高速永磁电机的研究主要集
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


