
PID控制在反应釜温度控制中的应用控制在反应釜温度控制中的应用
常规PID的控制,不但其参数难以整定,而且还依赖于对象的精确数学模型,适应性较差,对复杂过程不能保证
其控制精度。根据反应釜温度时间滞后具有非线性、强耦合、不确定性过程的控制需要,提出了一种基于BP神
经网络的PID控制方法。并介绍了神经网络PID控制器的算法,对经典PID参数选取进行了分析。仿真结果表
明,与传统PID算法相比,该控制方法可实现有效的控制,具有实现简单、控制效果好的特点。
摘摘 要:要:
关键词:关键词: 常规PID;BP神经网络;仿真
常规PID控制算法对于大部分工业过程的被控对象控制效果良好[1,2],但是对于反应釜温度的时间滞后问题,PID控制算
法在控制温度跟踪变化曲线时存在振荡和精度低的缺点。近年来,神经网络控制以其独特的优点受到控制界的关注。神经网络
的优势在于能够逼近任意复杂的非线性映射,具有超强的自学习和自适应能力,具有很强的鲁棒性和容错性,因此用神经元网
络设计的控制系统具有良好的自适应性和控制性能[3,4]。为了克服反应釜温度的时间滞后问题,本文结合BP神经网络控制策
略,采用基于BP神经网络的PID控制方法对其进行控制,反应釜温度能自动跟随给定的温度曲线,满足工艺要求。
1 反应釜温度控制系统反应釜温度控制系统
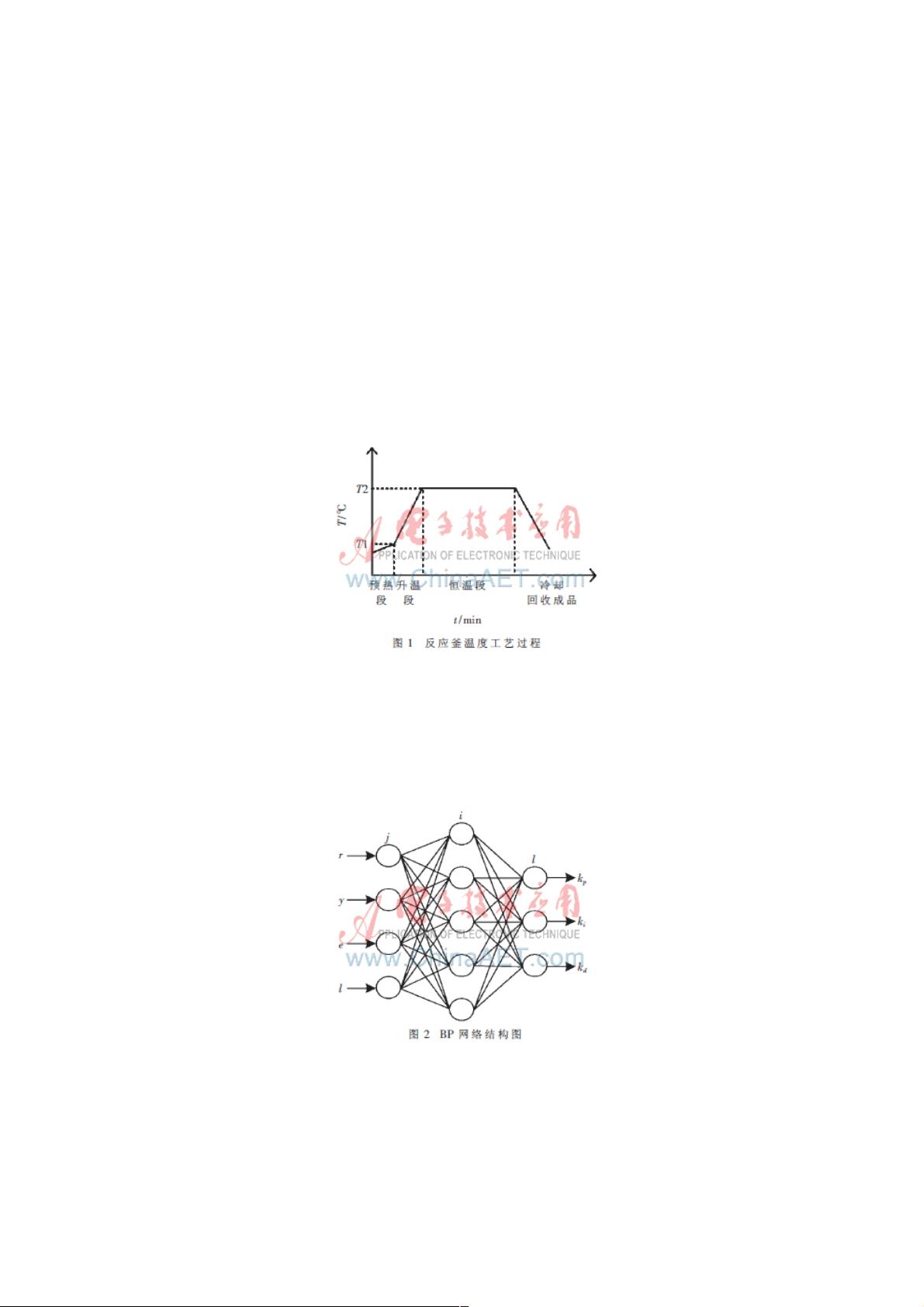
反应釜按反应的特性可以分为吸热反应和放热反应。一般来说,聚合反应属于放热反应,而裂变反应属于吸热反应。反应
釜的操作流程一般包括如图1所示的四个阶段[5]。
图1中恒温段是反映工艺的关键阶段,对于产品质量和产量有着重要的影响,所以提高恒温段的控制精度是提高产品质量的
关键。
实际反应过程中常伴有强烈的放热效应,使反应温度有所变化。针对反应釜温度控制的特点,本文采用基于BP神经网络的
PID控制方法。通过神经网络的在线学习功能,增强系统的鲁棒性和自适应能力,使系统具有良好的调节品质,在对象参数变
化的情况下仍具有很强的鲁棒性和抗干扰能力。
2 基于基于BP神经网络的神经网络的PID控制算法控制算法
本文采用的是三层BP网络,其结构如图2所示[6],输入层神经元的个数取4,分别对应于输入r、输出y、误差e和单位1,隐
含层神经元为5个,输出层神经元分别对应PID控制器的3个可调参数kp、ki、kd。系统运行过程中,神经网络根据系统的状
态,通过加权系数调整,使神经网络的输出对应于某种最优控制律下的PID控制器参数[7]。
资源评论


weixin_38747126
- 粉丝: 5
- 资源: 921









最新资源
- 航飞动三自由度弹道仿真,第一段无动力飞行,第二段启动推力,第三段比例导引
- 基于小程序的民大食堂用餐综合服务平台源代码(java+小程序+mysql+LW).zip
- 基于小程序的个人健康数据管理系统的设计与实现源代码(java+小程序+mysql+LW).zip
- 驾押人员考勤情况表.xls
- 基于小程序的智慧乡村旅游服务平台的设计与实现源代码(java+小程序+mysql+LW).zip
- 基于小程序的在线订餐系统的设计与实现源代码(java+小程序+mysql+LW).zip
- 基于小程序的无中介租房系统源代码(java+小程序+mysql+LW).zip
- 计算机网络学习资料全面整理
- 基于小程序的作品集展示微信小程序源代码(java+小程序+mysql+LW).zip
- 编程题各种典型应用举例.txt
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


