目 录
第 1 章 配线……………………………………………………….…1
1.
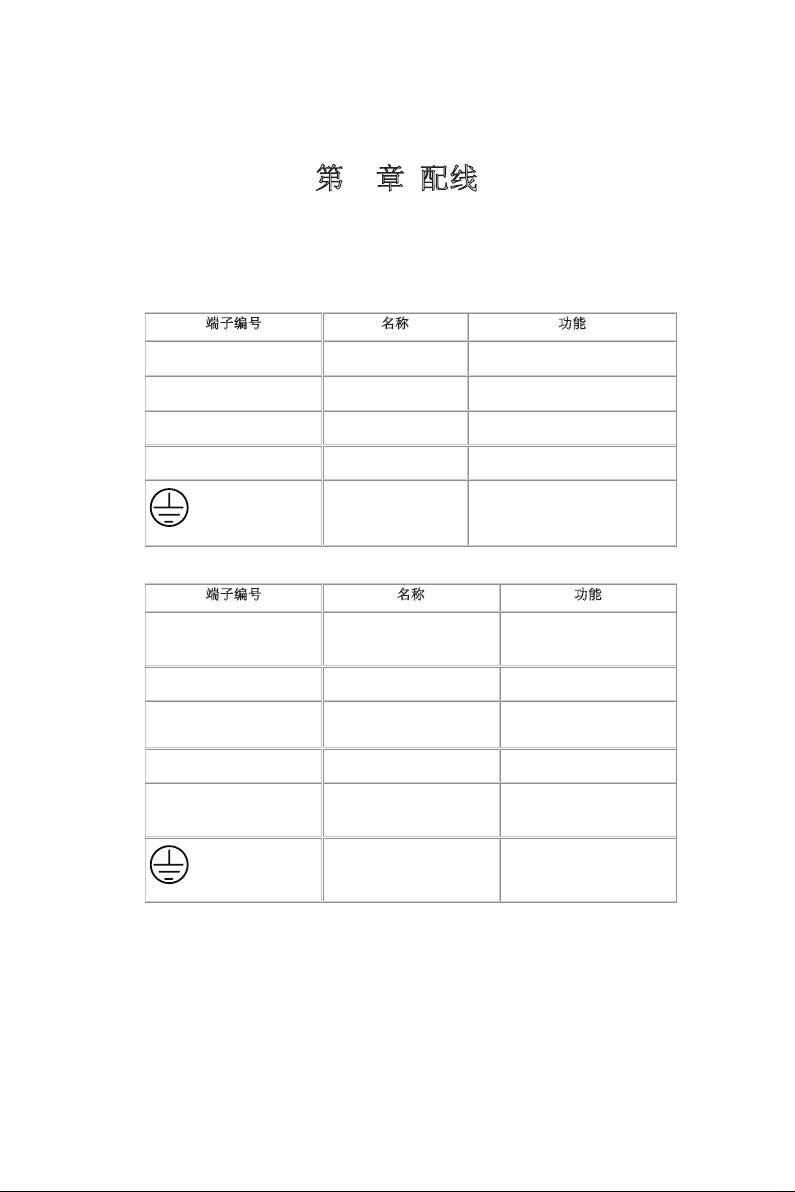
1 驱动器电源端子……………………………………………1
1.
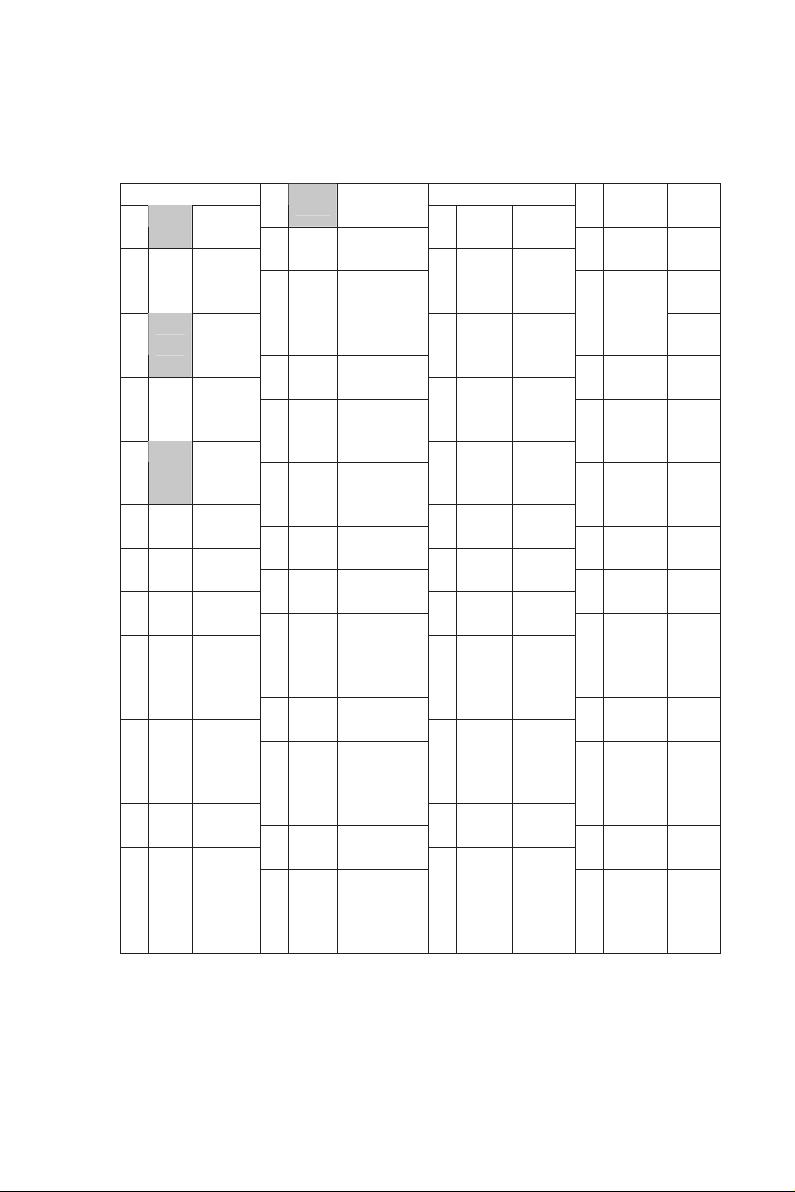
2 控制信号连接器(CN1)的端子排列一览…………………..2
1.
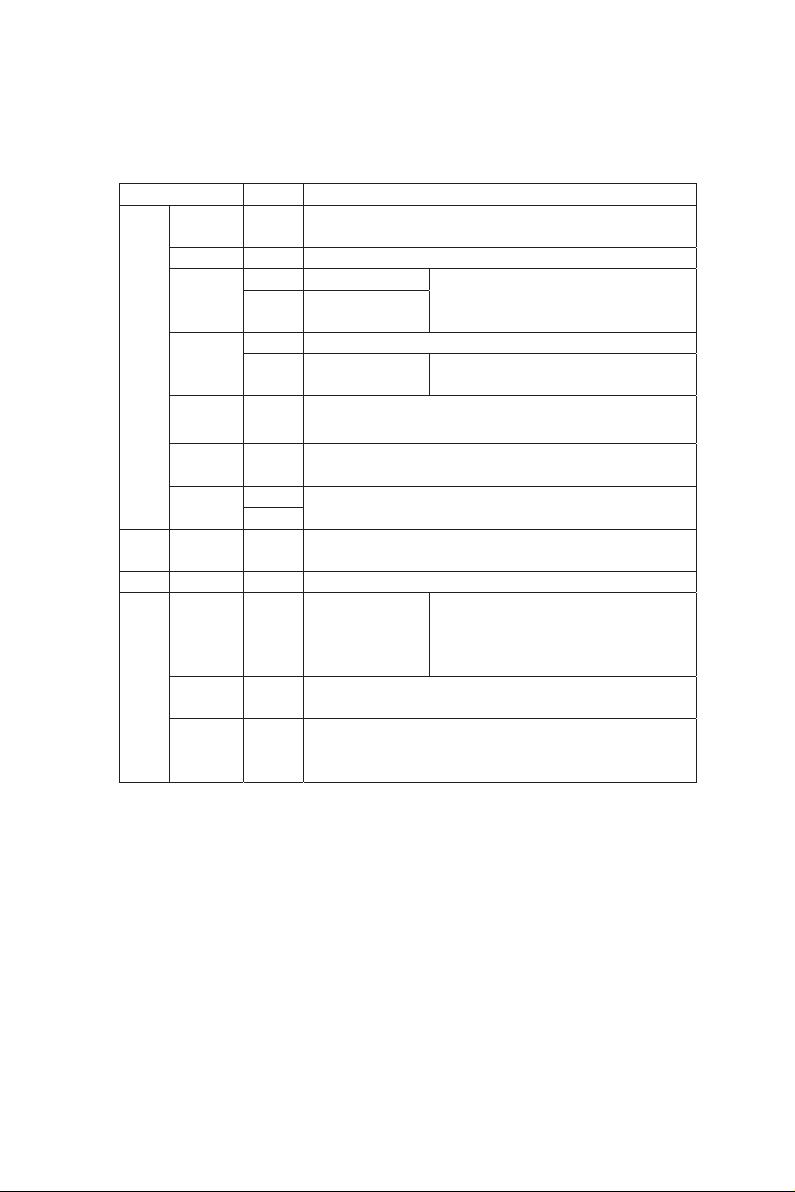
3 输入信号说明……………………………………………....3
1.
4 输出信号……………………………………………………5
1.
5 编码器接口…………………………………………………7
1.
6 标准接线……………………………………………………8
第
2 章 面板操作及使用方法………………………………………...9
2.
1 按键功能描述………………………………………………9
2.
2 操作方法示意图……………………………………………9
2.
3 基本模式显示切换………………………………………..10
2.
4 JOG 用法………………………………………………...10
2.
5 数码管状态显示…………………………………………..10
2.
6 告警操作…………………………………………………..11
2.
7 告警查询…………………………………………………..12
2.
8 故障操作…………………………………………………..12
附
录 A 辅助功能执行模式一览…………………………………...13
附
录 B 用户参数表………………………………………………...16
附
录 C 监视模式一览……………………………………………...19
附
录 D 告警一览表………………………………………………...30