

13-1
第 13 章:FBs-PLC 的 NC 定位控制
早期使用一般电机作为定位控制,由于速度不快、或者精度要求不高,所以足够应对所
需场合;当机械运转为了获取效率而将速度加快时,当产品质量、精度要求越来越高时,电
机停止位置的控制就不是一般电机所能达到的了!解决这一问题的最佳方法是采用 NC 定位
控制器配合步进或伺服电机作定位控制。但在过去,由于它的价格很高,而限制了它使用的
普遍性,近年来由于技术的发展及成本的降低,其价位已被用户所接受,使用数量也越来越
多。为配合这一趋势,FBs-PLC 将目前市面上专用的 NC 定位控制器功能整合在 FBs-PLC
内部 SoC 芯片内,除了免掉 PLC 与专用 NC 定位控制器之间复杂的数据交换与连结程序外,
更大幅降低整体成本,为用户提供一种价廉物美、简单方便的 PLC 整合 NC 定位控制的方案。
13.1 NC 定位控制的方式
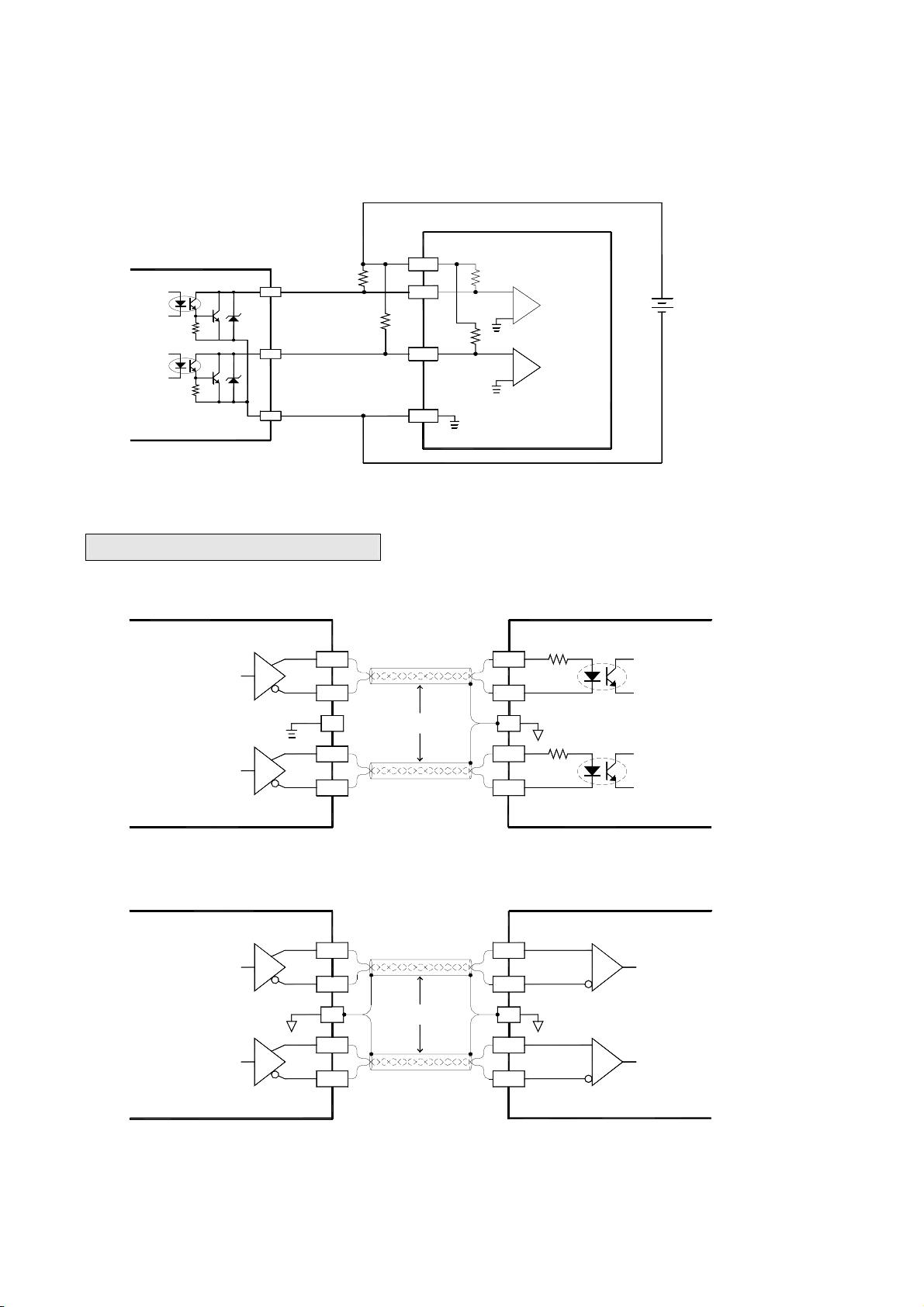
PLC 与步进或伺服驱动器的控制界面大致有下列方式:
z 通过数字 I/O 方式下达命令:使用简单但应用灵活度比较差
z 通过模拟量输出方式下达命令:控制反应较灵敏但成本较高并且容易受噪声干扰
z 通过通讯方式下达命令:通讯协议无标准并且受通讯反应限制,因此应用有瓶颈
z 通过高速脉冲方式下达命令:成本低廉容易准确控制
以高速脉冲方式控制步进或伺服驱动器是比较常用的方法;PLC 的 CPU 模块如果内部
含有多轴高速脉冲输出以及高速硬件计数器,并且能提供简易使用和设计的定位程序编辑,
则对于这方面的应用,更是如虎添翼、如鱼得水、得心应手了!
常用的 PLC 结合伺服驱动器所构成的 NC 伺服系统有如下两种:
z
半闭环回路控制
PLC 只负责发送高速脉冲命令给伺服驱动器,装在伺服电机的位移检测信号直
接反馈到伺服驱动器,闭环回路只在伺服驱动器与伺服马达中;优点是控制简单精
度足够(适合大部份的应用),缺点是不能真正反映实际经过传动机构的真正位移量,
况且如机构磨损、老化或不良,就没有办法给予补偿或检测。
z
闭环回路控制
PLC 负责发送高速脉冲命令给伺服驱动器,除了装在伺服电机的位移检测信号
直接反馈到伺服驱动器外,外加位移检测器装在传动机构之后,真正反映实际位移
量,并将此信号反馈到 PLC 内部的高速硬件计数器,这样就可作更精确的控制,并
且可避免上述半闭环回路的缺点。
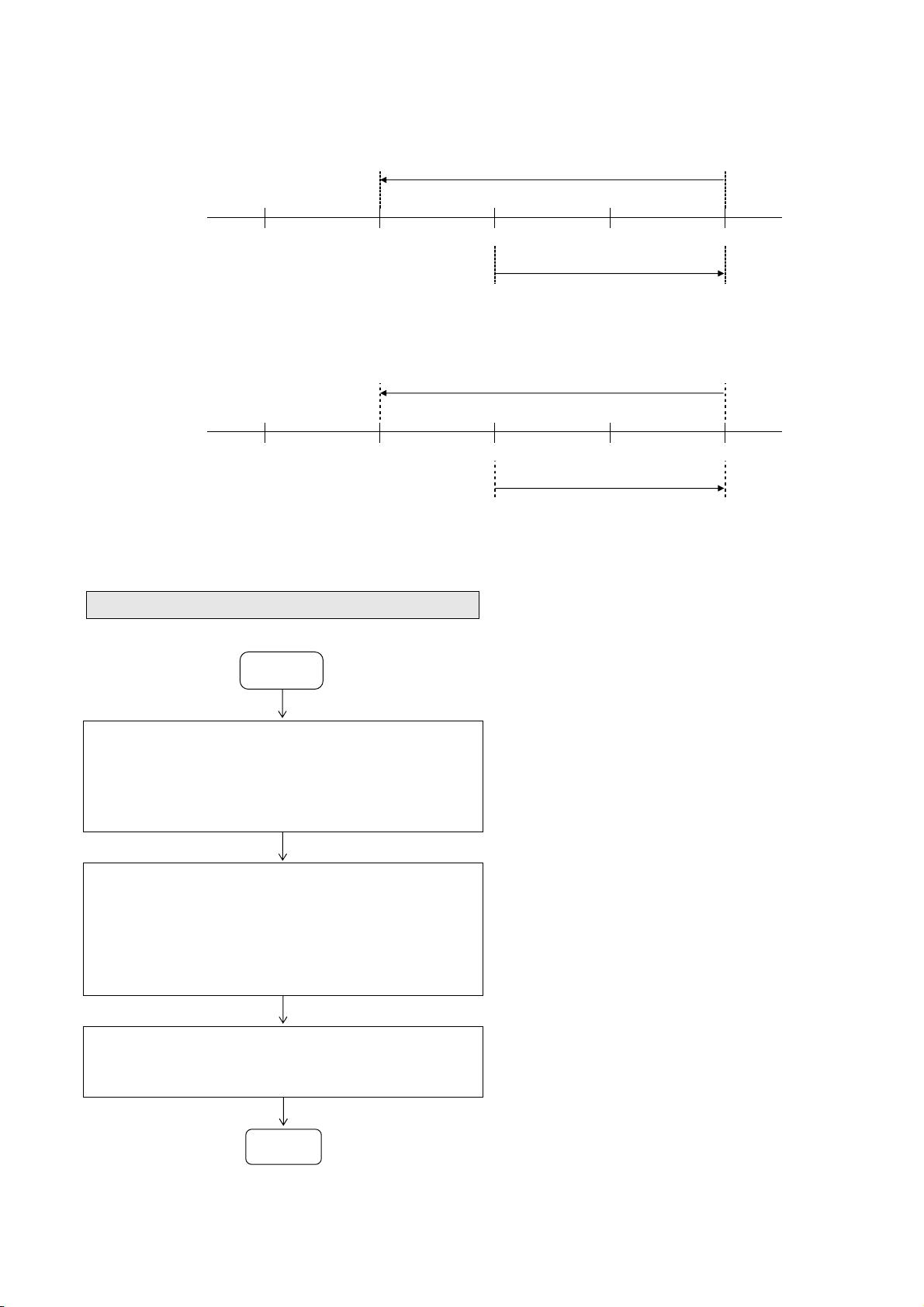
13.2 绝对坐标与相对坐标
移动距离的表示,可用绝对位置来表示(绝对坐标定位),或者用相对距离来表示(相
对坐标定位);而 DRV 指令用来驱动电机。
当以绝对坐标来表示移动距离时,
如目前位于 100mm,要行走到 300mm 时,则定位指令为 : DRV ABS, ,300,Ut
如目前位于 300mm,要行走到 0mm时,则定位指令为 : DRV ABS, , 0,Ut
当以相对坐标来表示移动距离时,
如目前位于 100mm,要行走到 300mm 时,则定位指令为 : DRV ADR,+,200,Ut
如目前位于 300mm,要行走到 0mm时,则定位指令为 : DRV ADR,−,300,Ut

剩余43页未读,继续阅读






评论0
最新资源