


PLANT IDENTIFICATION AND CONTROL USING A NEURAL
CONTROLLER BASED ON REFERENCE MODEL.
Cosme Rafael Marcano-Gamero
Systems Engineer (Universidad de los Andes, 1986)
Magíster Scientiarum in Electronics Engineering (UNEXPO, 2004)
Professor at Electronics Department of the
Universidad Nacional Experimental Politécnica “Antonio José de Sucre” (UNEXPO)
Puerto Ordaz – Venezuela.
cosmemarcano@gmail.com
Abstract. Plant or process identification in order
to put it under control has always been a problem
hard to face up, due to the no linearity of a real
process. In this work, Neural Control theory is
applied to identify and control a plant conformed
by two subsystems of second order which
alternate their operation on a constant time base.
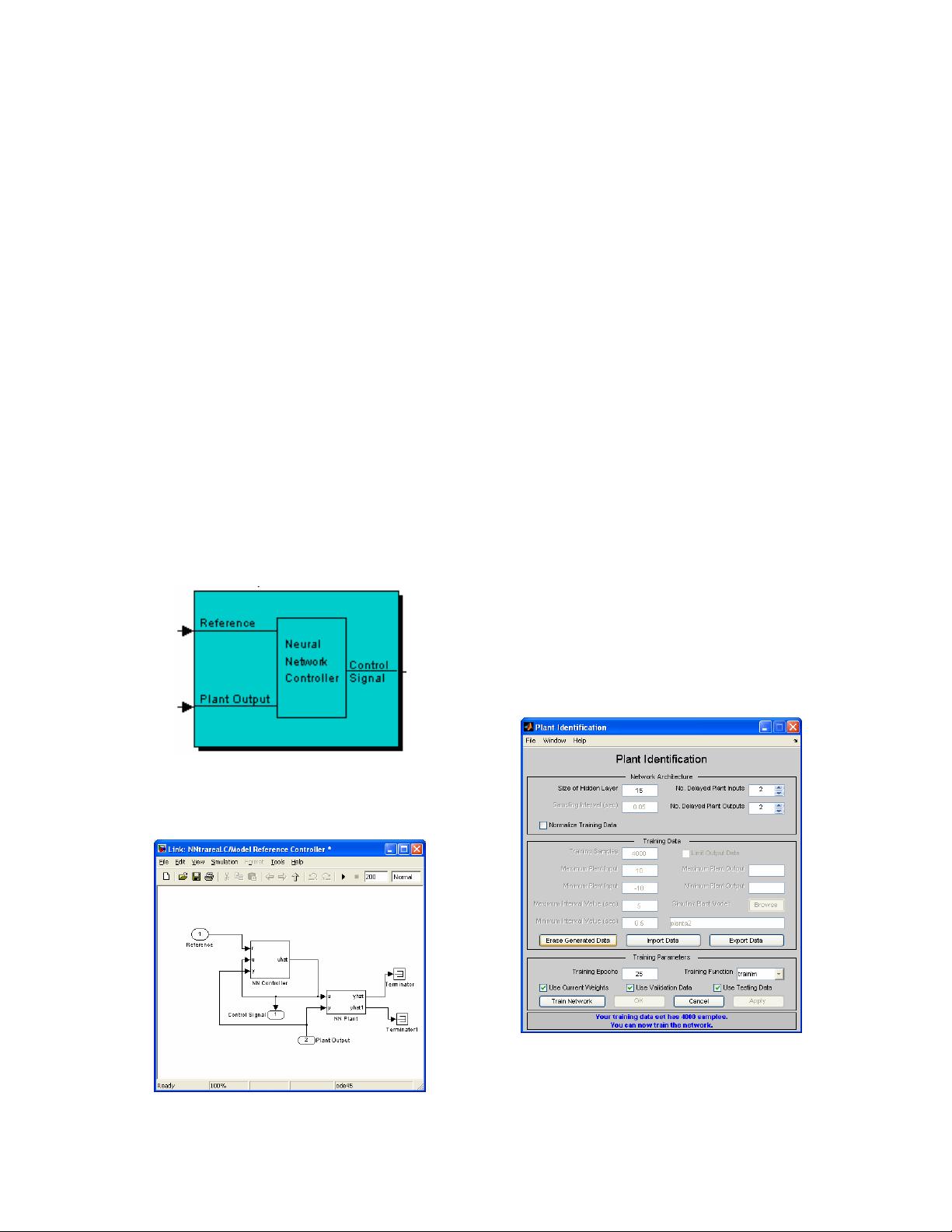
Firstly, a neural network is trained to learn the
plant behavior. Once trained, this network is
integrated to the rest of the system in order to
jointly operate with another neural network which
will serve as a controller. Obtained results permit
us assure the actual possibility of using neural
networks to identify and controlling this kind of
plant. However, special interest must be pay in the
controller fine adjustment, in order to minimize
the steady state error.
Key words: Neural Control, Plant Identification,
Neural Controller Training.
1. INTRODUCTION
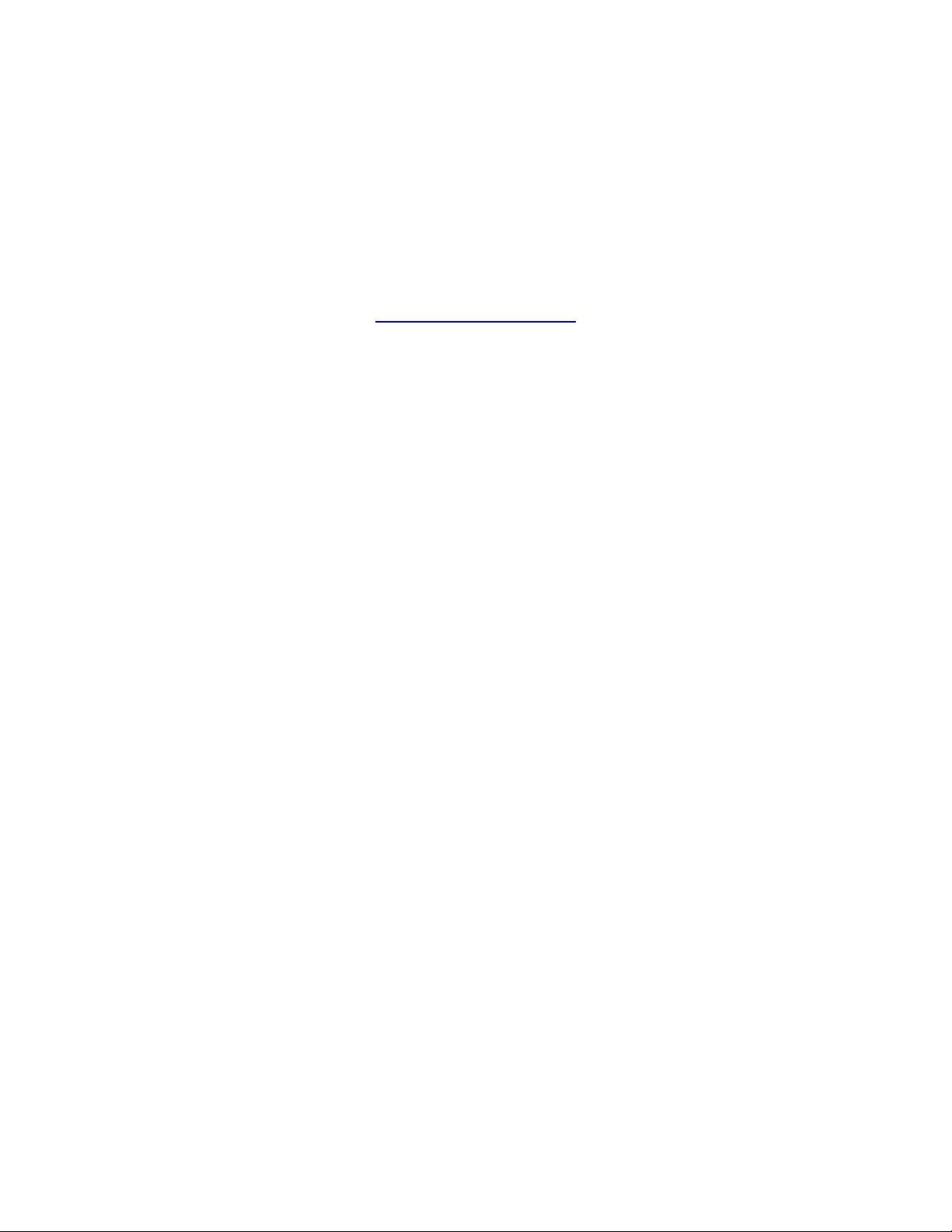
Present work consists of a neural control
application on a non linear plant, based on the
reference model technique. Firstly, a neural
network is designed to identify the plant, i.e., the
neural network ‘learns’ the plant behavior through
some kind of training, and this knowledge is then
used to generate an output signal which is
compared with the actual plant output. This
comparison is fed back and inputted to another
neural network which will act as the controller.
This neural controller is designed in such a way
that makes the plant output to follow the output of
a reference model, which dynamics be well
known. Plant under consideration is described in
Sec 2, and it is conformed by two subsystems
which alternate each 50s [1]. In Sec. 2, the plant
will be described, in such a way a proper neural
network design and parameterization be possible
to do, as explained in Sec. 3. Another neural
network will be trained in order to operate as a
plant’s controller, taking into account the behavior
of a reference model, which dynamic is well
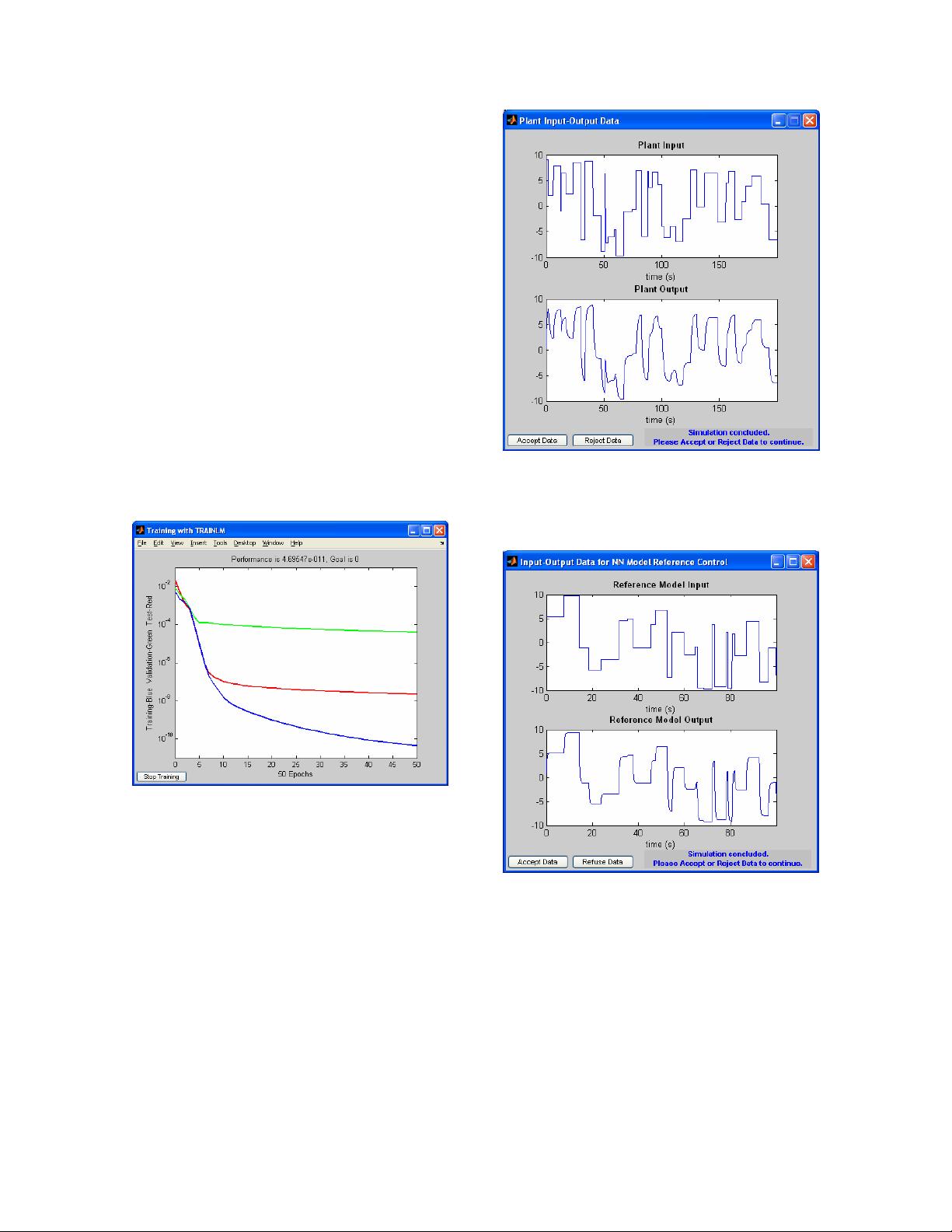
known. Results are obtained using Matlab 7.1,
through numerical simulations. They are presented
and analyzed in Sec. 4. Finally, in Sec. 5, some
conclusions are presented. It is important to note
that the plant definition describe a highly
nonlinear system over which neural control
strategy looks appropriate to be used for control
purposes.
2. PLANT DESCRIPTION.
Plant under consideration has two subsystems
which alternate each 50s. Subsystems 1 and 2 are
given by the equations systems (1) and (2),
respectively:
T
xxy
u
x
x
x
x
][]01[
0
1
00
11
21
2
1
2
1
=
+
−
=
&
&
(1)
T
xxy
u
x
x
x
x
][]11[
0
1
10
01
2
1
2
1
2
1
=
+
−
−
=
&
&
(2)
where ][
21
xx is the so-called state vector; y
designates the output plant; u is a scalar control
function. Both, subsystem 1 and 2, are of second
order we can see the subsystems poles and zeros
in order to find out their particular dynamics. As
we know from the control theory, poles can be
calculated by solving det(sI-A)=0, where A
designates the so-called system matrix or the state-
space matrix. In doing so, we get that the poles of
the subsystem 1 are }0,1{
2,1
−=s and subsystem
2 has two identical poles in -1. On the other hand,






评论0
最新资源