
基于模糊技术的水下机器人运动控制基于模糊技术的水下机器人运动控制
发展水下机器人有着重大而深远的意义,水下机器人的运动控制是实现其智能化的关键,是国内外研究的热
点。本文将模糊技术应用于水下机器人,根据水下机器人的六自由度运动模型,设计了水下机器人模糊控制器
与PID控制器,并进行了仿真环境下的试验比较。试验结果表明,基于模糊技术的方法显然有较大优势,更有利
于控制水下机器人的运动。
摘摘 要要: 发展
关键词关键词: 水下机器人;运动控制;
0 引言引言
水下机器人这一高新技术对开发蕴含巨大资源的海洋有着不可小觑的功劳,因此发展水下机器人很有必要。现如今越来越
多的地方用到水下机器人,如何控制好水下机器人来使其快速准确地完成人类派遣的任务就成为亟需解决的问题。而水下机器
人工作环境的特殊性,也增加了对水下机器人控制的难度,因此水下机器人的控制系统需有较强的自调节能力以及在线模型辨
识能力等[1]。
模糊控制技术(Fuzzy Control Technology)基于模糊数学理论,是近代控制理论中的一种高级新型技术[2]。它不需要过
程的精确数学模型,鲁棒性强,有较强的容错能力,操作人员易于设计和掌握。本文以水下状态检查机器人为实验平台,其运
动系统是非线性、时变、强耦合的,通常工作在几米甚至更深的水下,受到各种未知因素的干扰[2]。由此看来,采用模糊方
法控制水下机器人精准运动无疑是最佳选择。
1 搭建运动模型搭建运动模型
水下机器人在水中运动时会受到各种力和力矩的作用,研究在这些力和力矩的作用下水下机器人的运动规律,搭建水下机
器人的运动模型,是研究和设计水下机器人控制系统的基础[1]。
1.1 水下状态检查机器人的结构水下状态检查机器人的结构
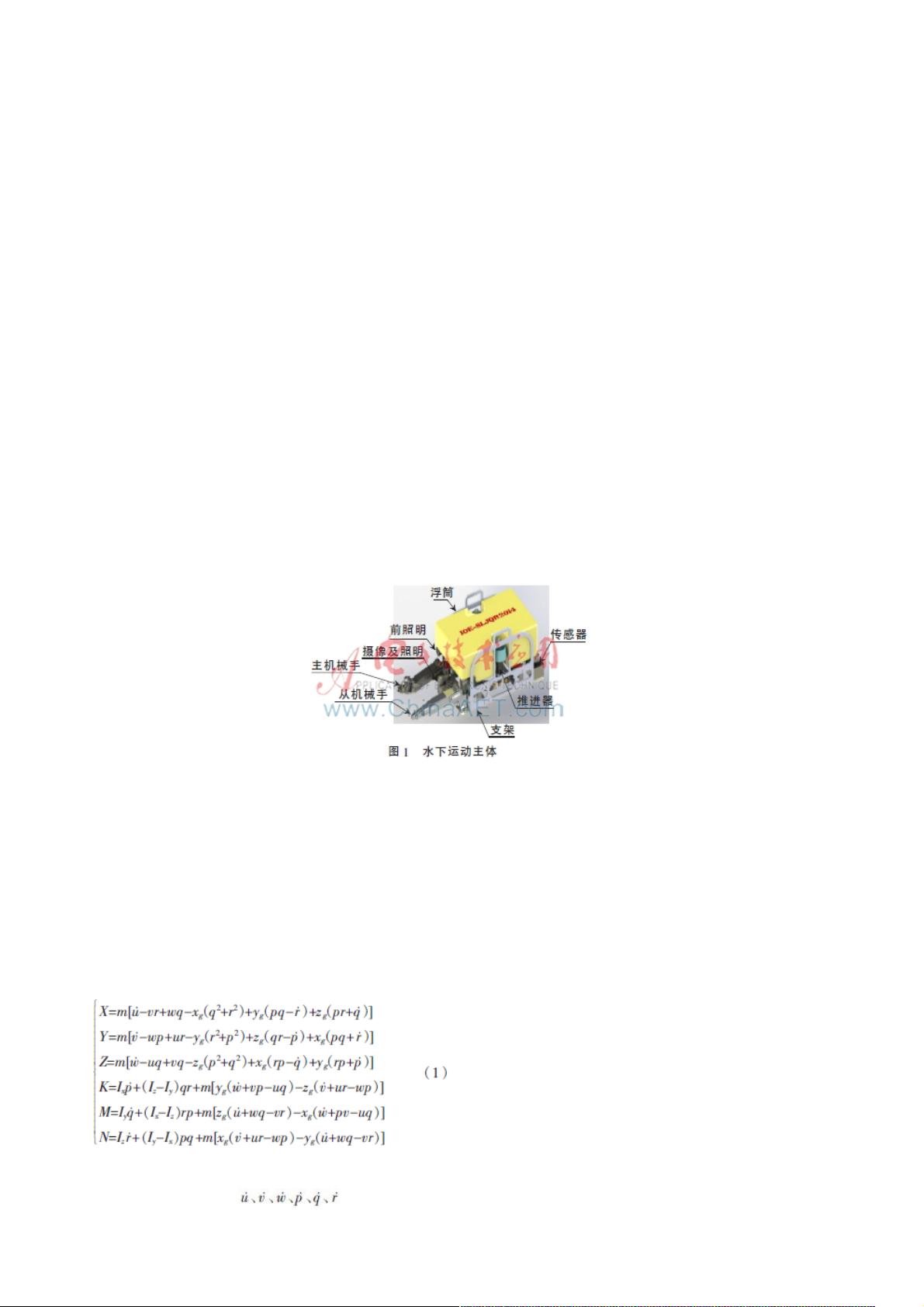
本文以实验室项目“水下状态检查机器人”为实验平台,水下运动主体如图1所示。螺旋桨式水下运动平台作为该系统的主
体部分,配置了6个位置耦合的推进器,其中2个竖直方向推进器作为垂直推进,另外4个推进器作为平面运动及转动推进,推
进器对称分布,确保水下机器人在运动时受力平衡,完成较精确定位。水下状态检查机器人通过自身的状态检查和陆上主控制
器的算法控制,可实现水中的高稳定悬停和平稳的三维空间运动,其中运动的速度连续可调,潜浮运动时最大深度可达到30
m。
1.2 水下状态检查机器人空间运动方程水下状态检查机器人空间运动方程
使用六自由度的空间运动方程来表示实验平台在水下的运动状态。为了使模型具有一般性,假设水下机器人重心G与载体
坐标系原点O不重合,G在载体坐标系中的坐标为xg、yg、zg[1]。
因此得到的六自由度空间运动方程如下[1]:
其中,m表示水下状态检查机器人的质量;Ix、Iy、Iz是质量m相对于载体坐标系各轴的转动惯量;u、v、w、p、q、r是
其6个自由度的(角)速度; 是其6个自由度的(角)加速度;X、Y、Z、K、M、N是其所受外力(矩)。
2 模糊控制器模糊控制器
资源评论


weixin_38697123
- 粉丝: 2
- 资源: 924









最新资源
- redis可视化工具:RedisDesktopManager
- 众数问题-使用python的scipy库解决众数问题.md
- 众数问题-使用python的collections库解决众数问题.md
- 众数问题-使用纯python代码解决众数问题.md
- asm-西电微机原理实验
- 第三阶段模块一-数字排序
- 解决ubuntu23.10安装向日葵失败,使用apt install -f无法解决依赖问题
- Screenshot_20241117_024114_com.huawei.browser.jpg
- .turing.dat
- shopex升级补丁只针对 485.78660版本升级至485.80603版本 其它版本的请勿使用!
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


