
第
28
卷第
12
期
振动与冲击
JOURNAL
OF
VIBRATION
AND
SHOCK
Vo
l.
28
No.
12
2009
新型方尖塔形定子二自由度超声电机的结构设计、驱动机理与性能研究
金家橱,张建辉,赵淳生
(南京航空航天大学精密驱动研究所,南京
21
∞
16)
摘
要:提1I
1~.
种新型二自由度超卢电机结构及
I
作原理
c
该电机具有一个方尖塔形定子和一个具有凹球面的
棋胀
,
íi'
-f
山顶斥);弹簧!长在基座的
PI
]J.求一由]二、利用定子局部弯曲振动作为
T
作模态,使得该型电机易于小型化。有限
;[;f
jj
具观察到了定子驱动端的椭阅运动,作用于球面基座Iî
J
驱动定子运动。原理样机性能为
x
方向最大速度
145
mn
叭
,
y
方向最大速度
180
mrνS
,
X
方向最大推力
4.3
N
,
y
方向最大推力
5.0
N
。
关键词:越卢电机;伞i'l
ffi
度;塔形定子
中图分类号
TB522
文献标识码
A
随着科技的发展,一些精密装置对运动的要求越
来越高,单自由度驱动已经无法满足要求。若每个自由
度的运动由一台单自由度电机来完成,这必然造成机
构复杂、体积庞大、动态性能差。利用超声电机基本原
理逐步发展起来的多自由度超声电机具有较高的机械
集成度,可用于微小型机器人关节和眼球的驱动,精密
加工和装配的进给、空间探测器等装置。
目前,多自由度超声电机可分为单定子和多定子
两类,均使用了球形转子。多定子多自由度超声电机
可分为行波型和驻波型,远山等人
[IJ
研制的二自由度
球形超声波电机是单自由度行波超声电机的变体,一
个球形转子配备了多个行波型超声电机的定子。驻波
型多定子多自由度超声电机也是驻波型旋转超声电机
的变体,一个球形转子配备了多个驻波型超声电机的
定子。如河井等人
[2J
提出兰自由度驻波型超声波电机
和佐佐江等人
[3
]提出的驻波型兰自由度球形超声技电
机等。多定子多自由度超声电机采用多个单自由度定
子共同作用于一个球形转子,形成球形转子的多方向
转动。这类电机结构复杂,各定子间的动力学糯合问
题需要深入研究。
单定子多自由度超声电机多为驻波型。如单板式
多自由度超声电机[
4J
和单杆式多自由度超声电
机
[5
-9J
该类电机由一个定子(板或杆)和一个转子
(球体)组成,可以产生三个自由度的运动。单板式多
自由度超声电机结构紧凑,且力矩较小;单杆式多自由
度超声电机力矩较大,但是,由于利用了纵振模态,使
得定子轴向尺寸较大,小型化困难。
2006
年立陶宛学者
P.
Vasiljev
在南京航空航天大
基金项目:国家自然科学基金资助项目(
10874090)
,国家自然科学基金
资助项目
(50775109)
和江苏省自然科学基金资助项目
(B
K2∞
9373
)
截稿日期:
2008
一
11
一
19
修改稿收到日期
:2008
~
11
~
28
第一作者金家相男,博士生,讲师,
1965
年
11
月生
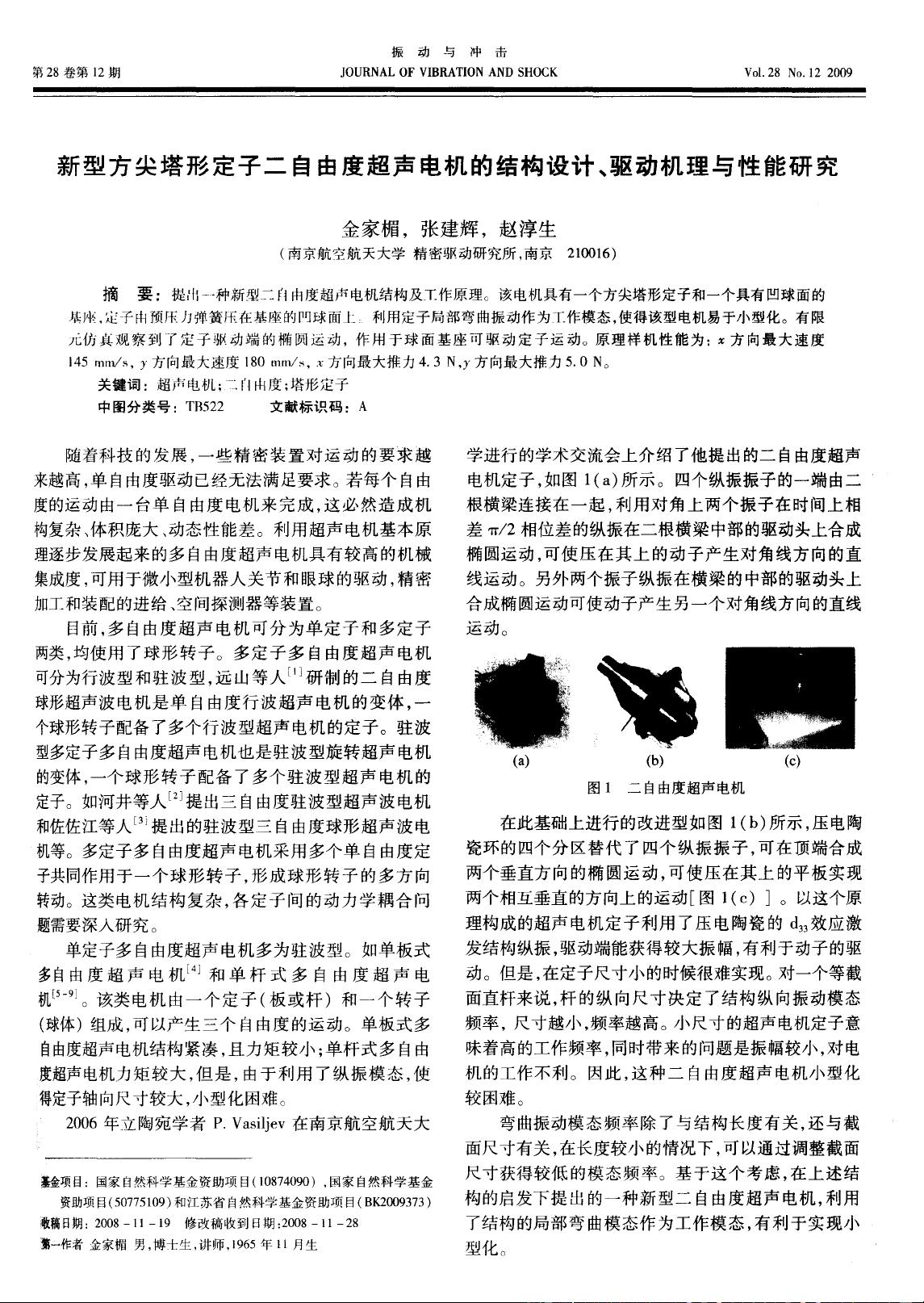
学进行的学术交流会上介绍了他提出的二自由度超声
电机定子,如图
1
(a)
所示。四个纵振振子的一端由二
根横梁连接在一起,利用对角上两个振子在时间上相
差
τ/2
相位差的纵振在二根横梁中部的驱动头上合成
椭圆运动,可使压在其上的动子产生对角线方向的直
线运动。另外两个振子纵振在横梁的中部的驱动头上
合成椭圆运动可使动子产生另一个对角线方向的直线
运动。
、‘
(a)
(b)
(c)
图
l
二自由度超声电机
在此基础上进行的改进型如图
1
(b)
所示,压电陶
资环的四个分区替代了四个纵振振子,可在顶端合成
两个垂直方向的椭圆运动,可使压在其上的平板实现
两个相互垂直的方向上的运动[图
l(c)
]
0
以这个原
理构成的超声电机定子利用了压电陶瓷的
d
33
效应激
发结构纵振,驱动端能获得较大振幅,有利于动子的驱
动。但是,在定子尺寸小的时候很难实现。对一个等截
面直杆来说,杆的纵向尺寸决定了结构纵向振动模态
频率,尺寸越小,频率越高。小尺寸的超声电机定子意
味着高的工作频率,同时带来的问题是振幅较小,对电
机的工作不利。因此,这种二自由度超声电机小型化
较困难。
弯曲振动模态频率除了与结构长度有关,还与截
面尺寸有关,在长度较小的情况下,可以通过调整截面
尺寸获得较低的模态频率。基于这个考虑,在上述结
构的启发下提出的一种新型二自由度超声电机,利用
了结构的局部弯曲模态作为工作模态,有利于实现小
型化。
资源评论


weixin_38695061
- 粉丝: 4
- 资源: 931









最新资源
- formatted-task029-winogrande-full-object.json
- formatted-task028-drop-answer-generation.json
- formatted-task027-drop-answer-type-generation.json
- formatted-task026-drop-question-generation.json
- formatted-task025-cosmosqa-incorrect-answer-generation.json
- 技术资源分享-我的运维人生-安卓应用界面布局与交互功能开发脚本
- formatted-task024-cosmosqa-answer-generation.json
- formatted-task023-cosmosqa-question-generation.json
- 可见光通信与定位的多载波无载波幅度相位调制技术研究
- 技术资源分享-我的运维人生-《Django 项目数据初始化与管理脚本》
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


