
第
31
卷第
2
期
2011
年
2
月
计算机应用
Joumal of Computer Applications
Vo
1.
31
No.2
Feb.2011
文章编号
:1001
-9081(2011)02
-0341
-03
doi:l0.
3724/SP.
J.
1087.2011.00341
新的单目立体视觉的视差图的获得方法
徐妹妹
1
,王元庆
1
,张兆扬
2
(1.南京大学电子科学与工程学院,南京
210093;
2.
上海大学通信与信息工程学院,上海
200072)
(
yqwang@
nju.
edu.
cn)
摘
要:在立体视觉中,视差间接反映物体的深度信息,视差计算是深度计算的基础。常见的视差计算方法研究
都是面向双目立体视觉,而双焦羊目立体视觉的视差分布不同于双目祝差,具有沿极线辐射的特点。针对双焦单目
立体视觉的特点,提出了一种单目立体视差的计算方法。对于计算到的初步视差图,把视差点分类为匹配计算点和
误匹配点。通过均佳偏移向量(
Mean-Shift)
算法,实现了对误匹配点依赖于匹配点和图像分割的视差估计,最终得到
致密准确的视差图。实验证明,这种方法可以通过双焦立体图像对高效地获得场景的视差图。
关键词:立体视差;双焦羊目立体;视差图;图像分割;
Mean
-Shift
算法
中图分类号
:T
凹
9
1.
41
文献标志码
:A
Extracting disparity
map
from bifocal monocular stereo vision in a novel way
XU
Shu-shu
1
,
WANG
Yuan-qing
1
,
ZHANG
Zhao-yanl
(1. School
0/
Electronic Science
and
Eng
ι
neering
,
N
α
njing
University,
N
,
α
njing
Jiangsu
210093
,
Chin
α;
2. School
0/
Comminication
α nd
Ii
呐
m
刷刷
Engineering
,
Sh
α
nghai
University,
Shangh
αi
200072,
Chin
耳)
Abstract:
Disparity is a key point in stereo
vision
田
it
shows the depth information of the scene indirectly, and disparity
calculation is the basis of the depth calculation. The traditional disparity calculation methods are
a11
targeted at binocular
stereo. However
, compared with disparity in binocular, the disparity in monocular stereo is radial along epipolar
1i
ne.
Conceming the characteristics of bi-focal monocular stereo vision
, an approach to get disparity map from bi-focal images was
proposed in this paper.
Preliminaηdepth
map was obtained by matching cost calculated.
By
using Mean-Shift algorithm,
discontinuities and misunderstandings in primary depth map were smoothed and eliminated according to the matched points and
graph
cut
result. The experimental results show that this method can get disparity map efficiently from pairs of bi-focal images.
Key
words:
stereo disparity; bi-focal monocular stereo; disparity map; graph cut; Mean-Shift algorithm
0
引言
视差最初在人类视觉系统中是用来描述相关特征在左右
眼中位置不同的程度。在现代立体视觉系统中,视差是非常
重要的物理量,间接地反映了深度信息,是联系二维图像和三
维空间的桥梁。双目立体视觉中,立体视差是同一点投影到
左右平面的矢量差,当左右成像相机光轴平行时,视差严格反
映成水平视差。视差的估计过程就是在对应立体图像对中寻
找匹配对的过程,立体视差估计关键在立体匹配算法。立体
匹配可以分为特征匹配川和稠密匹配
[2]
两大类。特征匹配
通过提取图像中的点、线、面特征或者相位特征等作为匹配基
元,计算立体图像对的相关性得到稀疏的视差数据。稠密匹
配对每个像素都计算对应点的左右图位置,得到稠密的视差
结果。相对于特征匹配,稠密匹配不需要特征提取和特征描
述步骤,算法简单,但是计算量大。目前有很多研究集中于双
目立体视觉视差的获得,
Scharstein
等人
[3]
对这些方法做了分
类和评估。
除了双目立体视觉,近年来,单目立体成像系统由于体积小、
定点观察等特点,越来越多地被采用。
Saxena
等人
[4]
采用一系列
单目图像及其真实深度图为信息,用机器学习的方法训练马尔可
收稿日期
:2010-06-30;
修回日期
:2010
-08
-11
。
夫场函数,以预测单目图像中的视差分布。本文采用单目双焦摄
影系统,获得单目立体图像对。不同于双目立体视觉中水平视差
的特点,单目双焦立体视觉中视差的表现为成像点关于成像中心
的位移。本文针对于单目视觉的这个"辐射"特点,提出了一种
新的不依赖于先验知识的视差估计方法。
1
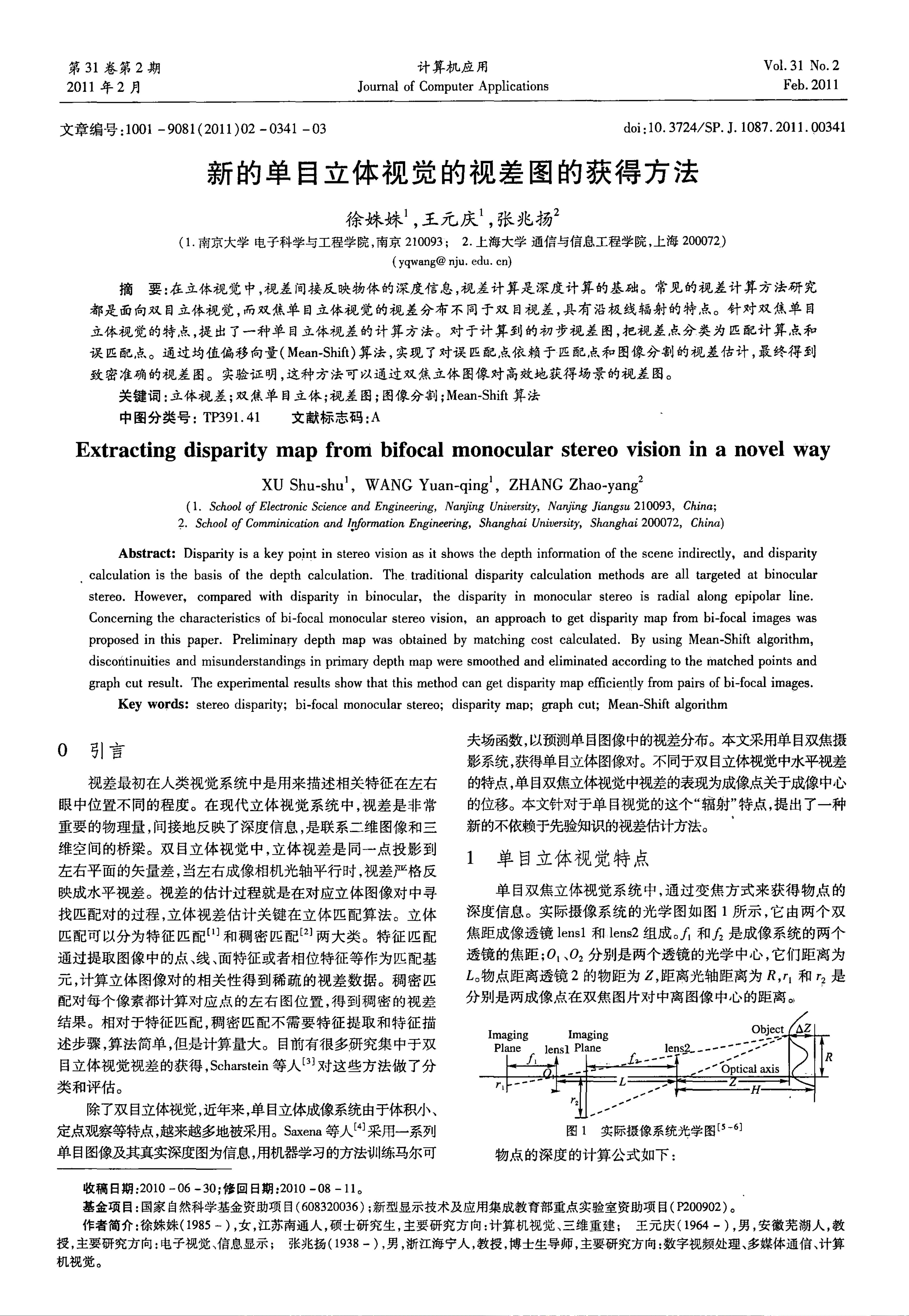
单目立体视觉特点
单目双焦立体视觉系统中,通过变焦方式来获得物点的
深度信息。实际摄像系统的光学图如图
1
所示,它由两个双
焦距成像透镜
lensl
和
lens2
组成。;;和
12
是成像系统的两个
透镜的焦距
;
0\
、
O
2
分别是两个透镜的光学中心,它们距离为
L
。物点距离透镜
2
的物距为
Z
,
距离光轴距离为
R
,
r\
和巧是
分别是两成像点在双焦图片对中离图像中心的距离。
h
Imaging
Im
aging
Plane
元
lensl
Plane
r,t--
---
,
,
r,
;-
,
,
,
,
Object
len
毯,,""'二二,,,
Jb"'?IY"
__
--
Optic
a1
axis
L
,
,
,
H
,
,
,
,
图
l
实际摄像系统光学图
[S
斗]
物点的深度的计算公式如下:
R
基金项目:国家自然科学基金资助项目
(608320036)
;新型显示技术及应用集成教育部重点实验室资助项目(
P2
00902)
。
作者简介:徐妹妹(1
985
斗,女,江苏南通人,硕士研究生,主要研究方向:计算机视觉、三维重建;
王元庆(1
964
- )
,男,安徽芜湖人,教
授,主要研究方向:电子视觉、信息显示:
张兆扬(1
938
- )
,男,浙江海宁人,教授,博士生导师,主要研究方向:数字视频处理、多媒体通信、计算
机视觉。

weixin_38695061
- 粉丝: 4
- 资源: 931









最新资源
- 基于springboot+vue的实践性教学系统源码(java毕业设计完整源码+LW).zip
- 基于SpringBoot的食物营养分析与推荐网站的设计与实现源码(java毕业设计完整源码+LW).zip
- AvalonDock-master WPF
- 基于BS架构社区快递上门服务系统设计与实现源码(java毕业设计完整源码).zip
- (177631206)大麦抢票+源代码+辅助工具+详细文档教程
- 基于javaweb宿舍管理系统源码(java毕业设计完整源码).zip
- 英飞凌79AMOSFET
- 基于javaweb的在线购物平台源码(java毕业设计完整源码).zip
- ETOPO2022一秒钟冰面高程数据集.zip
- 基于全阶滑模观测器的IPMSM无位置传感器控制策略研究
- 基于JavaWeb的宠物救助及领养平台的设计与实现源码(java毕业设计完整源码+LW).zip
- 设计模式 DesignPatterns C#源码
- 基于Java技术的救灾物资调动系统源码(java毕业设计完整源码).zip
- 机械设计无纺布检测机(sw可编辑+工程图+bom)全套设计资料100%好用.zip
- MATLAB用yalmip+cplex解决电动汽车有序充放电问题,目标函数为总负荷峰谷差最小,代码可运行且有注释
- 基于java的城市公交查询系统源码(java毕业设计完整源码+LW).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0