
第
17
卷第
6
期
2013
年
6
月
电机与控制学报
ELECTRIC
MACHINES
AND
CONTROL
Vo
l. 17
No.6
June 2013
一种磁链轨迹跟踪的
PWM
方法及其特性分析
吴德会,
柳振凉,
夏晓吴,
张忠远
(厦门大学机电工程系,福建厦门
361005)
摘
要:提出一种基于磁链轨迹跟踪策略的电动机变频调速方法。该方法不通过空间也压矢量的
合成,而直接通过实际磁链矢量来跟踪基准磁链圆轨迹,再由跟踪的结果决定逆变器的开关状态模
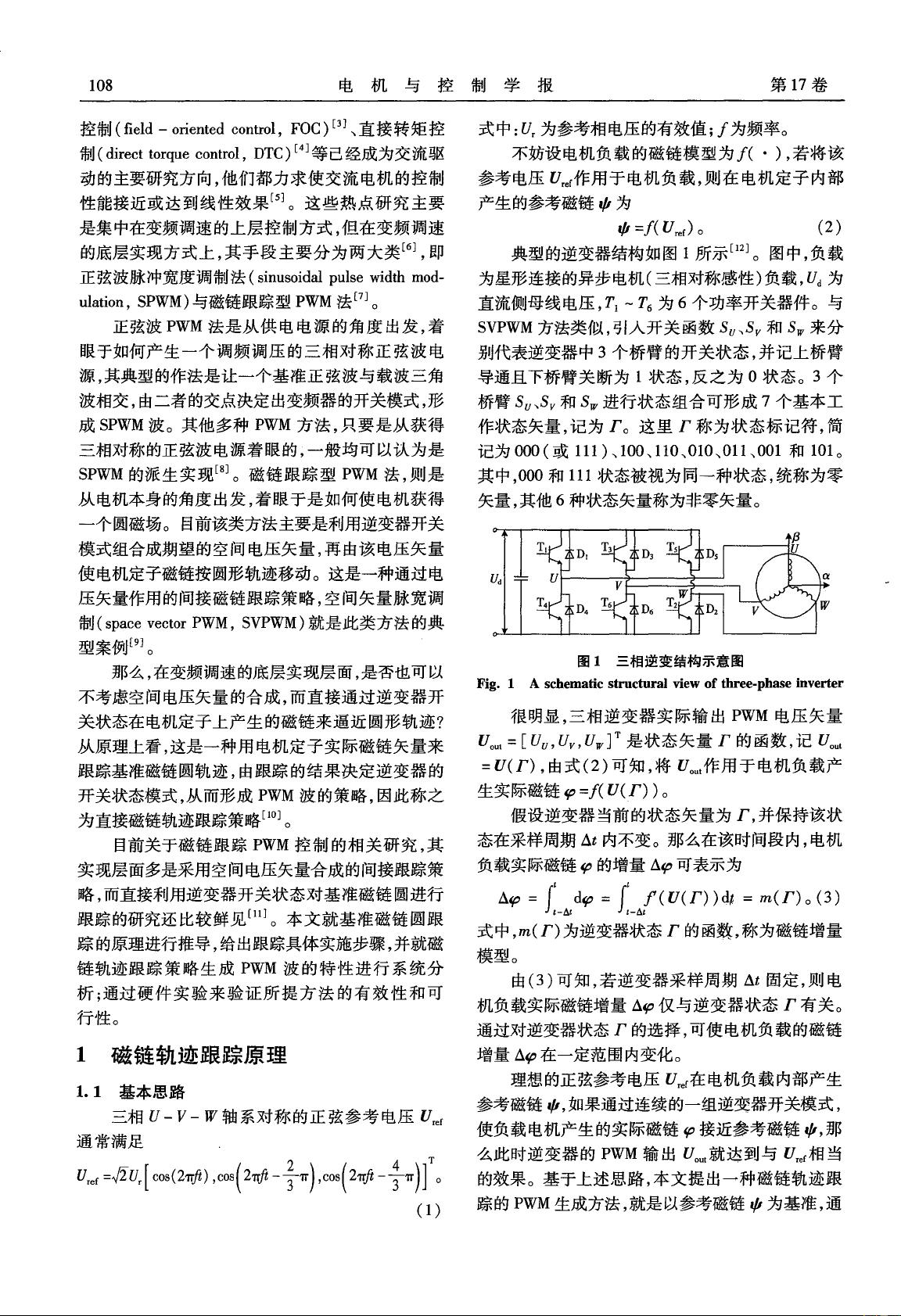
式,从而实现,对脉冲宽度调制
(PWM)
波的调制输出。对该方法的基本原理进行推导,给出具体的
控制策略,并对其产生的
PWM
波形特性进行系统分析。仿真及物理实验结果表明,该方法幅度调
制比可达到
1
,电压利用率与空间矢量脉宽调制
(SVPWM)
方法相同,比正弦波脉宽调制
(SPWM)
提高
15.47%
;同时验证了其跟踪误差上限的存在性,为进一步分析该方法精确度提供了定量依
据。该方法为变频调速的底层实现提供了另一种可行的途径。
关键词:磁链;轨迹跟踪;逆变器;电压利用率;脉冲宽度调制
中固分类号;
TP
242;
TP
273
文献标志码
:A
文章编号;
1
∞
'7-449X(2013
)06-0107-10
PWM
method
of
f1
ux linkage trajectory tracking and
analysis
of
its characteristics
WU
De-hui
,
LIU
Zhen-lia
吨
XIA
Xiao-hao
,
ZHANG
Zhong-yuan
(Department
of
Electronic
Mechanical
Engineeri
吨,
Xiarnen
University
,
Xiarnen
361005
,
China)
Abstract:
A frequency control underlying implementation of induction motor was suggested based on flux
linkage
tr
哉
jectory
tracking.
By
changing the operate mode of inverter, the actual flux linkage was pro-
duced
to
tracking the reference flux linkage circle , and the corresponding pulse width modulation
( PWM) waveform was also generated.
Th
e basic theoretical computing equation was deduced, a specific
control strategy was suggested
, and the characteristics of the
PWM
waveform generated was analyzed.
Simulations and experimental results
show
出
at
the modulation index is up to 1 , and the voltage utilization
is
same as SVPWM , while
15.47%
higher than SPWM. Furthermore , the existence of error upper limit
was verified
, which provides a quantitative basis for further analysis of the accuracy.
Key
words:
flux linkage;
traject
。可
tracking;
inverter; voltage utilization; pulse width modulation
。
号|
-昌
电子器件构成变频器
[1)
使用脉冲宽度调制(
pulse
width modulation
,
PWM)
方法产生电压幅值及频率
可变驱动电源
[2)
。目前,基于空间矢量的磁场定向
在现代变压变频调速中,通常使用全控型电力
收稿日期:
2012
-11 -23
基金项目:国家自然科学基金
(51177141)
;福建省自然科学基金
(20IOJ013IO)
;中央高校基本科研业务项目
(0620ZK1007
)
作者简介:吴德会(1
975
一)
,男,博士,副教授,硕士生导师,研究方向为电气工程及机电装备;
柳振凉(1
988
一)
,男,硕士研究生,研究方向为有限元分析、机电工程;
夏晓吴
(1987
一)
,男,硕士研究生,研究方向为无损检测、控制工程;
张忠远(1
988
一)
,男,硕士研究生,研究方向为元损检测、机电工程。
通讯作者:吴德会
剩余9页未读,继续阅读
资源评论


weixin_38694006
- 粉丝: 5
- 资源: 923









最新资源
- 毕业设计JAVAWEB校园订餐系统项目源码
- html css js分页按钮
- Comsol多孔板相场断裂模型:一种高效的数值模拟工具,好的,以下是根据您提供的“comsol多孔板相场断裂模型”提炼出的一个标题: COMSOL多孔板相场模拟与断裂分析模型 此标题涵盖了您提供
- Vcredist运行库【2005、2008、2010、2012、2013、2015-2022】X86+X64集合打包
- 六轴EtherCAT总线伺服涂布收卷机程序:动态测量与同步控制,具备参考值的六个伺服+变频器+编码器方案,六轴EtherCAT总线伺服涂布收卷机高级编程:伺服、变频器与编码器的协同控制及动态测量频率转
- springboot接入InfoSuiteAs
- 命令行界面构建库 :CmdForge
- 电力系统风储协同调频策略的MATLAB仿真模型:基于四机两区系统的频域模型与控制策略优化分析,MATLAB仿真模型:风储联合一次调频在四机两区电力系统的应用与优化,电力系统风储联合一次调频MATLAB
- 【微信小程序源码】笑话
- 「三菱R系列PLC应用:ST、RD77MS定位与触摸屏配方功能实现异地操作及快速通信」,三菱R系列PLC案例详解:高级应用与CClink通信实现机器人远程操作及触摸屏配方功能,三菱R系列PLC案例程序
- 【微信小程序源码】滑动选项卡
- Video_59564296397953.mp3
- 使用c++开发相机的示例CameraDS,引用DirectShow技术
- 贪吃蛇 web版 支持python启动
- 基于NRBO优化算法的Transformer-BiLSTM回归模型Matlab代码:适用于多变量时序预测的电力负荷与光伏功率预测,NRBO-Transformer结合BiLSTM神经网络的时序数据回归
- 【微信小程序源码】京东白条
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


