

第 30 卷 第 1 期
Vol. 30 No. 1
控 制 与 决 策
Control and Decision
2015 年 1 月
Jan. 2015
双率系统辅助模型框架下的随机牛顿递推辨识
文章编号: 1001-0920 (2015) 01-0117-08 DOI: 10.13195/j.kzyjc.2013.1227
曹鹏飞, 罗雄麟
(中国石油大学 自动化研究所,北京 102249)
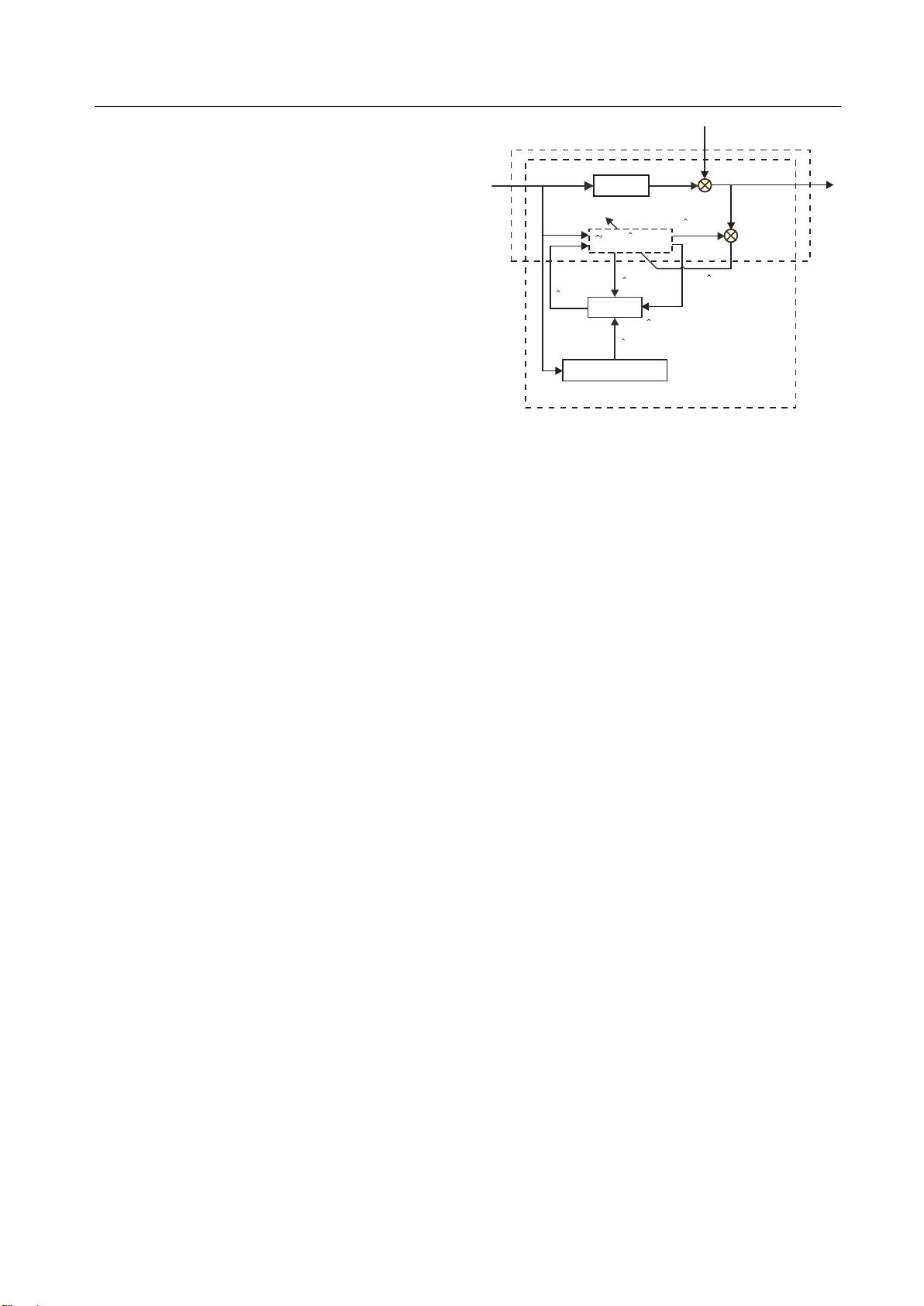
摘 要: 针对双率系统, 采用基于辅助模型的改进随机牛顿递推算法辨识输出误差模型. 若当前参数估计对应的
估计系统不稳定, 则出现中间不可测时刻输出估计发散, 辨识过程停止. 增加非线性模型与常规辅助模型一起为
下步递推提供信息估计, 确保递推进行. 为避免出现输入不充分或者广泛时 Hessian 阵奇异或者接近奇异的情况,
在 Hessian 阵的递推中增加对称正定矩阵. 最后给出了所提出辨识算法的一致收敛性证明.
关键词: 双率系统;辨识;双辅助模型;收敛分析;改进随机牛顿算法
中图分类号: TP273 文献标志码: A
Auxiliary-model-based stochastic Newton recursive identification for
dual-rate system
CAO Peng-fei, LUO Xiong-lin
(Research Institute of Automation,China University of Petroleum,Beijing 102249,China.Correspondent:LUO
Xiong-lin,E-mail:luoxl@cup.edu.cn)
Abstract: An auxiliary-model-based improved stochastic Newton recursive algorithm is utilized to identify the output-error
model for the dual-rate system. The output estimations at the time between two slow-sampled periods will diverge when
the unstable estimated system arises and the identification process will cease. Therefore, a nonlinear model is proposed as
the sub-auxiliary model. Together with the general auxiliary model, the proposed model provides estimated information for
the next recursion. When the input is not general enough, the Hessian matrix will be singular or nearly singular. A positive
definite symmetric matrix is added to the recursion for Hessian matrix to ensure it positive definite. Finally, the uniform
convergence of the proposed algorithm is proved.
Keywords: dual-rate system;identification;double auxiliary models;convergence analysis;improved stochastic
Newton algorithm
0 引引引 言言言
由于受到客观物理因素的限制, 连续系统的输
入输出量有不同的采样频率, 从而形成了多采样频率
系统 (多率系统)
[1]
. 双率系统是一种特殊的多率系统,
其广泛存在, 并具有较强的研究意义. 双率系统控制
不仅在石油化工过程控制方面得到了成功应用, 在
理论方面也取得了一系列研究成果, 例如双率系统
自适应控制
[2]
、双率系统预测控制
[3]
、鲁棒控制
[4]
等.
而能否得到双率模型则是控制研究首要解决的问
题
[5-6]
, 因此双率系统辨识成为双率系统研究的最主
要的热点和难点之一. 一般是针对某种模型结构采
用某些辨识算法, 例如基于状态空间模型利用提升
技术辨识
[7]
、基于小波模型利用小波多分辨率分析辨
识
[8]
、基于差分方程利用多项式转换技术辨识
[9-10]
等
等.
本文主要针对快采样输入和慢采样输出的双率
系统建立输出误差模型, 并基于此模型研究辨识算法.
多项式转换技术
[9-10]
是辨识双率系统模型的主要方
法, 单率模型经过多项式技术转化为仅依赖于直接测
量数据辨识的双率模型, 并利用最小二乘算法辨识双
率模型参数和估计不可测时刻输出. 然而, 伴随更多
参数的出现, 计算量成倍增加, 因此多项式技术也存
在一定的局限性. Ding 等
[11-12]
在多项式变换后, 首先
根据递阶原理将双率模型分成多个维数较小的子系
收稿日期: 2013-09-05;修回日期: 2014-03-05.
基金项目: 国家973计划项目(2012CB720500);国家自然科学基金项目(61104218);中国石油大学(北京)科研基金项
目(YJRC-2013-12).
作者简介: 曹鹏飞(1988−), 男, 博士生, 从事软测量、系统辨识的研究;罗雄麟(1963−), 男, 教授, 博士生导师, 从事控
制理论、过程控制工程、化工系统工程、机器学习等研究.
剩余7页未读,继续阅读
资源评论


weixin_38673921
- 粉丝: 8
- 资源: 970









最新资源
- 嵌入式开发_ARM_入门_STM32迁移学习_1741139876.zip
- 嵌入式系统_STM32_自定义Bootloader_教程_1741142157.zip
- 文章上所说的串口助手,工程文件
- 斑马打印机zpl官方指令集
- 《实验二 面向对象编程》
- 《JavaScript项目式实例教程》项目五多窗体注册页面窗口对象.ppt
- Web前端开发中Vue.js组件化的应用详解
- labelme已打包EXE文件
- 一文读懂Redis之单机模式搭建
- Vue综合案例:组件化开发
- 《SolidWorks建模实例教程》第6章工程图及实例详解.ppt
- C语言基础试题.pdf
- Go语言、数据库、缓存与分布式系统核心技术要点及面试问答详解
- 7天精通DeepSeek实操手册.pdf
- DeepSeek R1 Distill 全版本安全评估.pdf
- DeepSeek 零基础入门手册.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


