
单片机与单片机与DSP中的基于单片机及中的基于单片机及VC++的步进电机控制系统设的步进电机控制系统设
计计
摘 要:步进电机作为机电一体化产品的执行元件,具有控制简便、定位准确等特点。本文 设计了一种基于
AT89S52 单片机和VC++的步进电机控制系统,给出了系统结构框图、硬 件电路图、软件设计流程图。所设计
系统可以通过上位机或下位机4*4 键盘输入指令,实现 对步进电机的基本控制,并利用上位机及LCD 实时显示
步进电机的运行状态。该设计方案 具有较高通用性和灵活性,开发成本较低,同时随着技术进一步改进,可以
直接应用到包装 机械或其他机械设备中,有很强实用性。 1 引言 步进电机是将电脉冲信号转变为角位
移或线位移的开环控制元件。在非超载的情况下, 电机的转速、停止的位置只取决于脉冲信号
摘 要:步进电机作为机电一体化产品的执行元件,具有控制简便、定位准确等特点。本文 设计了一种基于AT89S52 单片
机和VC++的步进电机控制系统,给出了系统结构框图、硬 件电路图、软件设计流程图。所设计系统可以通过上位机或下位机
4*4 键盘输入指令,实现 对步进电机的基本控制,并利用上位机及LCD 实时显示步进电机的运行状态。该设计方案 具有较高
通用性和灵活性,开发成本较低,同时随着技术进一步改进,可以直接应用到包装 机械或其他机械设备中,有很强实用性。
1 引言
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下, 电机的转速、停止的位置只取决
于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给 电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的
存在,加上步进电机只有周 期性的误差而无累积误差,使得在速度、位置等控制领域,用步进电机来控制变的非常的简 单
[1]。本文设计了一种基于AT89S52 单片机和VC++的步进电机控制系统,可以实现对步进 电机的基本控制及状态实时显示。
2 系统组成
使用、控制步进电机必须由环形脉冲源、功率放大电路等部分组成控制系统,脉冲信号 一般由单片机或CPU产生,一般
脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则 越大。功率放大是驱动系统最为重要的部分。步进电机在一定转
速下的转矩取决于它的动态 平均电流而非静态电流,平均电流越大,电机力矩越大,要达到平均电流大,这就需要驱动 系统
尽量克服电机的反电势。因而不同的场合采取不同的驱动方式。到目前为止,驱动方式 一般有以下几种:恒压、恒压串电
阻、高低压驱动、恒流等[2]。
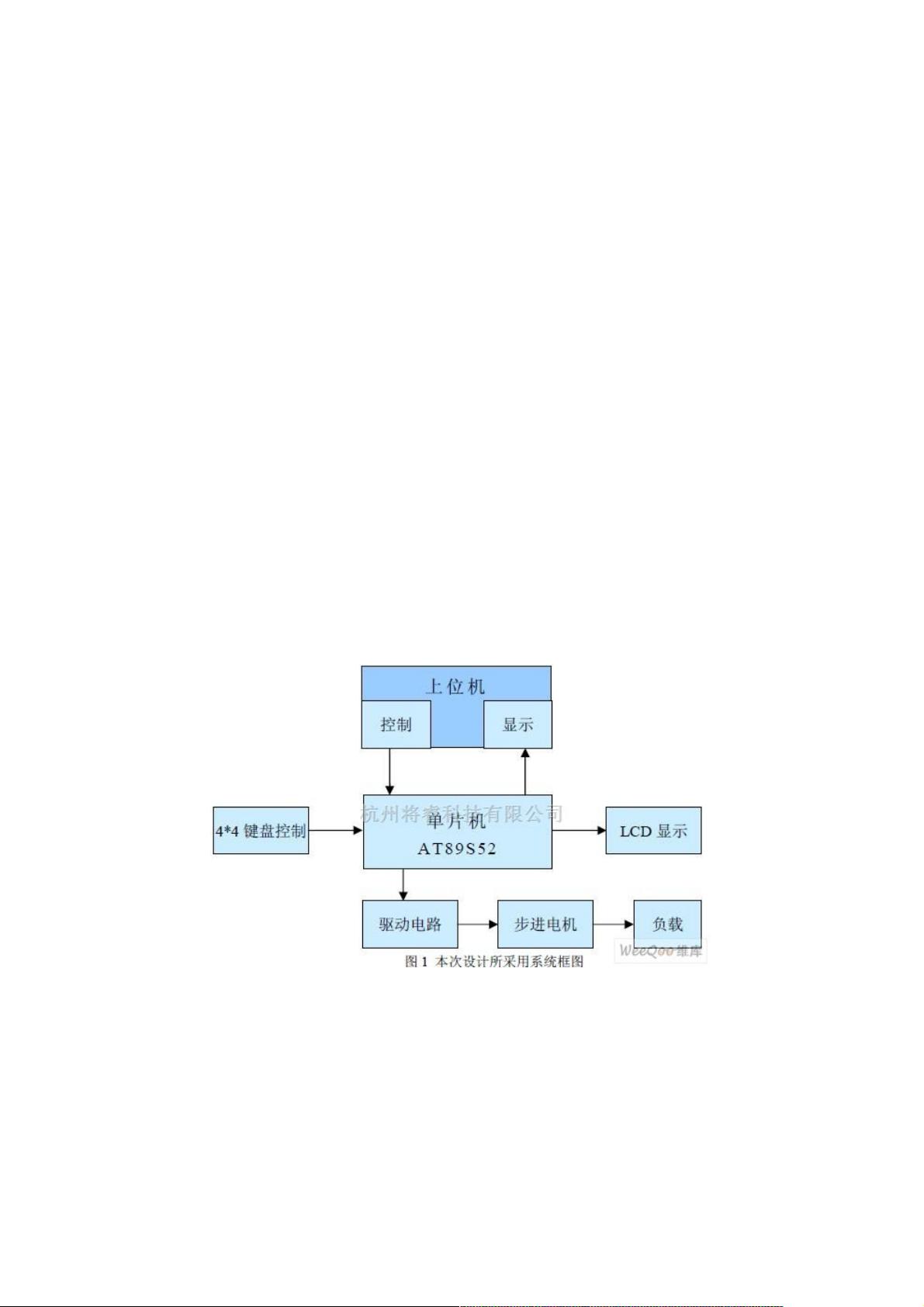
本文设计系统中,脉冲信号由单片机AT89S52产生并分配给步进电机各相,功率放大部分由驱动电路完成,系统结构框
图如图1所示。
本文所设计系统中,步进电机模块采用35BY48S03永磁式步进电机,用户利用4*4键盘或上位机的控制界面实现指令输
入,采用上位机或1602字符型液晶模块实时显示运行状态。
3 硬件设计
3.1 单片机最小系统电路
单片机的最小系统电路包括时钟电路和复位电路。本文所设计系统中,时钟电路采用内 部振荡方式,所得的时钟信号比
较稳定,实用电路中使用较多[3]。复位电路作用是使单片机 的片内电路初始化,使单片机从一种确定的状态开始运行。复位
电路采用2种基本形式:上 电复位、开关复位。
3.2 键盘电路
设计P1口接4*4键盘,键盘电路图如图2所示:
资源评论


weixin_38665629
- 粉丝: 4
- 资源: 958









最新资源
- bfgbghjyujkyuh
- 基于Java的宠物狗销售系统的设计与实现.doc
- 废物垃圾分类检测41-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- gperftools依赖到的unwind库,用于c++性能分析
- 数据管理界面插件REPORT11
- 基于java的大学生二手书在线买卖系统论文.doc
- RabbitMQ 的7种工作模式
- 停电自动关机程序.EXE
- ODrive 固件 0.5.6
- 基于Java的电影订票网站的设计与开发毕业设计论文.doc
- 基于tensorflow和cnn做的图像识别,对四种花卉进行了分类项目源代码+使用说明,可识别:玫瑰花、郁金香、蒲公英、向日葵
- 探索CSDN博客数据:使用Python爬虫技术
- SSM技术助力创客教育:小码创客教学资源库的构建与实现
- 废物垃圾检测28-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- Java SSM框架在农产品质量安全检测网站中的应用
- 基于javaweb的动漫网站管理系统毕业设计论文.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


