
Rotational Movement of “Z” shape Au/Pt Hybrid
Micro-Nanorobot
Abstract—This paper presented a“Z” shape Au/Pt hybrid
micro-nanorobot propelled by self electrophoresis driving. The Z
shape hybrid micro-nanorobot realized itself rotational
movement while having a parallel shift. The Z shape micro-
nanorobot was designed for the drug delivery, biomedical
engineering and so on. Just as its name implies, the mainly raw
materials are platinum and gold. Bythe focus ion beam (FIB) and
plasma sputtering, the Z shape nanorobot was fabricated. In
order to validate the fabrication method, the researchers adopted
the Energy dispersive X-ray analysis (EDS) to check the purity of
Pt and Au hybrid nanorobot inside theenvironmental scanning
electron microscope. Once the Z shape nanorobot was put into
the hydrogen peroxide (H
2
O
2
) solution, through the inverted
optical microscope, a rotational movement which kept
accordance with the analysis of the researchers was achieved.
After the rotational movement of nanorobot is realized, the
concentration ofH
2
O
2
influence on the movement of nanomotor
was evaluated.The nanorobot was put into theconcentration
rising from 3.0% to 7.6%, and then the average rotation speed of
nanorobot increased from 7rpm to 19rpm. Finally, the conclusion
was got from the article: 1) the Z shape Au/Pt hybrid micro-
nanorobot realized itself rotational movement while having a
parallel shift; 2) higher concentration the hydrogen peroxide
solution was, stronger propulsion force was generated. Thus the
nanorobot had a higher speed of rotational movement.
Keywords—Z shape nanorobot, self rotational movement, drug
delivery, concentration
I. INTRODUCTION
Nanorobots have been an area of great current interest,
because some interesting and promising applications based on
micro-nanorobot have been demonstrated in the biomedical,
bioanalytical [1-3] and environmental fields [4]. Especially in
the biomedical, nanorobots have a wide range of potential
applications, for example drug delivery system, minimal
invasive surgery and so on. In nature, there are many micro-
nanorobots, for example bacteria, cells, DNA and so on.
Traditionally, the two main classifications are microorganism
nanorobots and artificial nanorobots. Oliver G. Schmidt and
coworkers combined microorganism nanorobots and artificial
nanorobots together. They employed conical hollow tubes to
capture motile bovine sperm cells and develop hybrid micro-
biorobots [5]. Oliver G. Schmidt et al. also utilized the
rotational magnetic field to control the movement and
direction of microdrillers [6] and micromotors with built-in
compasses [7], fabrication is rolled-up nanotech [89]. In this
paper, The Z shape Au/Pt hybrid nanorobot fabricated by FIB
(Focus Ion Beam) realized itself rotational movement while
having a parallel shift. Without external force, the nanorobot
can realize the rotational movement. Because the fabricated
nanorobot is extremely tiny within sub micrometer scale, this
article introduced the stable and effective manipulation
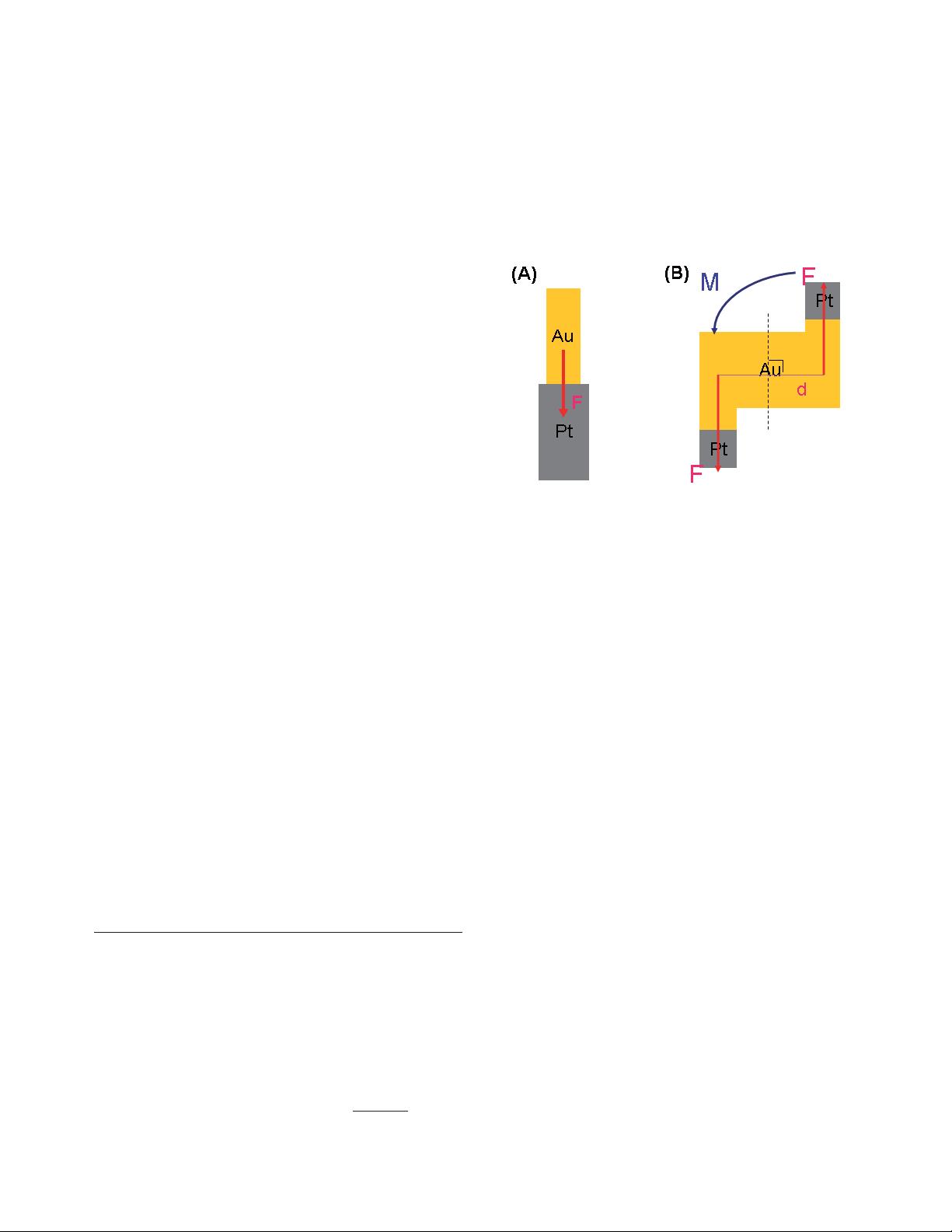
process. The figure 1 (A) indicates that the propulsion force of
Pt/Au hybrid nanorobot is from Au to Pt because of self-
electrophoresis. So in the design of nanorobot figure 1 (B), the
center part is coated with Au by sputtering and the two corners
are Pt etched by FIB.
II. M
ECHANISM OF ZSHAPEPT/AU HYBRID NANOROBOT
The Pt and Au are the catalysts of H
2
O
2
, which will
accelerate decomposereactions. The Z shape Au/Pt hybrid
nanorobot belongs tochemically powered micro-
nanorobot.Because the fabricated nanorobot is extremely tiny
within sub micrometer scale,this article introduced the stable
and effective manipulationprocess. The figure 1 (A) indicates
that the propulsion force of Pt/Au hybrid nanorobotis from
Auto Pt because of self-electrophoresis. So in the design of
nanorobot figure1 (B), the center part iscoated with Au by
sputtering and the two corners arePt etched by FIB. In this
way, twoparalleled forces with the opposite direction are
generated from the center Au to thecorner Pt. As a result, a
Kai Chen, Pengbo Wang, Lijun Yang, Yang Wang, ZhanYang, Lining Sun, Toshio Fukuda
*This work is supported by National Natural Science Funds of China
(Grant No.61403270) and Natural science foundation of Jiangsu Province
(Grant No. BK20140331)
Kai Chen, PengboWang, Zhan Yang and Lining Sun are withJiangsu
Provincial Key Labratory of Advanced Robotics & Collaborative Innovation
Center of Suzhou Nano Science and Technology, Soochow University,
Suzhou 215123, China.
Lijun Yang and Yang Wang are with school of mechatronics engineering,
Harbin Institute of Technology, Harbin, 150001, China
Toshio Fukuda is with ith the Department of Micro-Nano Systems
Engineering, Nagoya University, Furo-cho, Chikusa-ku, Nagoya 464-8603,
Japan.
*Contacting author: Zhan Yang (e-mail: yangzhan@suda.edu.cn).
Figure 1The design of Pt/Au hybrid nanorobot extended
from nanorobot. (A) The propulsionforceinPt/Au hybrid
nanorod. (B) The schematic of Pt/Au nanorobot.
978-1-4673-8156-7/15/$31.00 © 2015 IEEE
69
Proceedings of the 15th
IEEE International Conference on Nanotechnology
July 27-30, 2015, Rome, Italy
资源评论


weixin_38636577
- 粉丝: 4
- 资源: 935









最新资源
- Java项目-基于SSM+Jsp的助学贷款系统的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件)
- Java项目-基于SSM+Vue的在线购物系统的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件)
- 软件测试第一讲:http协议讲解
- Java项目-基于SSM+Jsp的电子竞技管理平台的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件)
- Java项目-基于SSM+Jsp的精品酒销售管理系统的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件)
- Java项目-基于SSM+Jsp的多角色学生管理系统的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件)
- Java项目-基于SSM+Jsp的龙腾公司员工信息管理系统的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件)
- Java项目-基于SSM+Jsp的在线云音乐系统的设计与实现(源码+数据库脚本+部署视频+代码讲解视频+全套软件)
- 讲解自动化气动知识内容
- system_ftnn_gbid.mp3
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


