基于模糊神经元控制的液压阀控马达速度系统
88 浏览量
2020-07-14
10:08:55
上传
评论
收藏 371KB PDF 举报

收稿日期 2010 10 20
作者简介蒋守勇1979 男 山东潍坊人 工程师 主要研究方向为机电一体化 煤矿机械设计
基于模糊神经元控制的液压阀控马达速度系统
蒋守勇 李永斌
煤炭工业济南设计研究院有限公司 山东 济南 250031
摘 要 将模糊控制与神经元网络结合并引入液压阀控马达系统中 提出了一种基于模糊神
经元网络控制策略的液压阀控马达速度控制方案 通过仿真证明 该控制策略提高了液压阀控马
达控制系统的自适应能力 改善了控制系统的性能
关键词 液压阀控马达 速度控制 模糊神经元控制
中图分类号 271文献标识码文章编号 1671 0959201009010302
液压马达速度伺服系统是工程上常用的伺服控制系统
它具有响应速度快 功率 重量比大 负载刚性高和性能价
格比高等特点 在航空航天 冶金 船舶和煤矿机械等工
业领域得到了广泛应用 在 工程 实际 中 经常要 对控 制对
象进行速度调节 使控制对象以给定的速度运动 并且要
求控制体的速度在被控制期间要恒定 当受到外界负载波
动影响时 速度波动值尽可能小 速度要平稳 由于 系统
是典型的非线性系统 工况比较复杂 受到的干扰比较大
大 若不采 取有 效 的控 制手 段 系 统 速 度就 不 可能 稳 定
有时甚至无法正常工作 文中 采用 模糊逻 辑和 神经元 网络
控制策略 设计了新的控制算法来解决液压阀控马达的控
制问题 将模糊 控制 技术与 神经 元网 络技术 相结 合 构建
模糊神经元网络控制器 提高了液压阀控马达控制系统的
自适应能力 改善了控制系统的性能
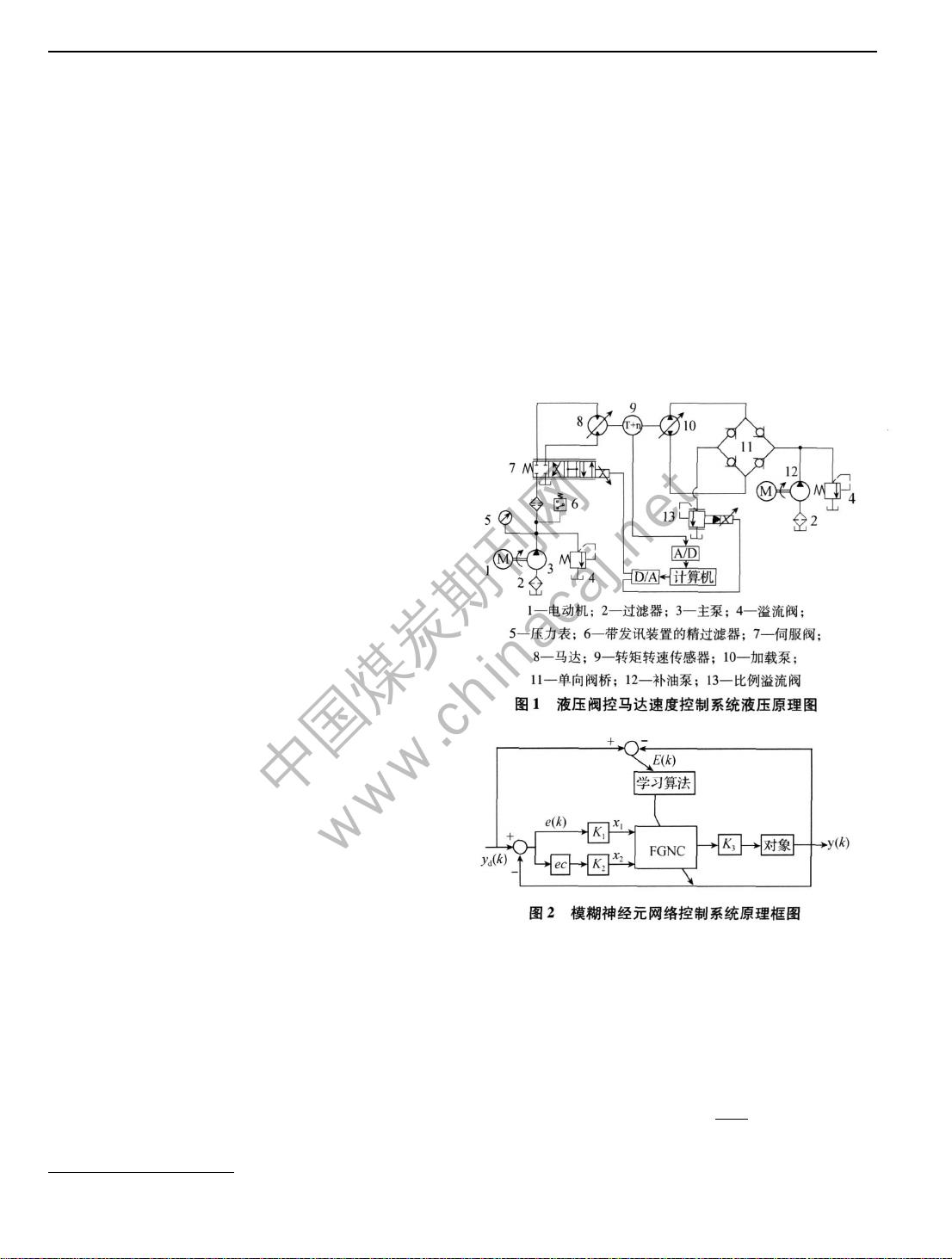
1液压阀控马达系统简介
液压阀控马达控制模块液压系统原理如图 1所示 电动
机 1带动主泵 3通过过滤器 2 吸油 作为伺服阀的主油源
伺服阀 7的输入电压信号为 10 10 加载 泵 10 单
向阀桥 11 比例溢流阀 13以及补油泵 12共同组成模拟负载
部分 工作时加载泵一直处于强制卸荷状态 通过改变比例
溢流阀的输入电压信号 可以使马达 8获得不同的负载 通
过实时调节伺服阀的输入电压信号从而可以改变阀芯位移
使马达进油腔的流量保持不变 以此来获得恒定的转速
2液压阀控马达速度系统模糊神经元网络控制器
设计
模糊神经元网络控制器的设计主要包括确定控制目的
输入输出语言变量 设计控 制目 的控 制规则 确 定模 糊控
制器的参数 图 2 为模糊神经元网络控制系 统原理框图
图 2中
为系统期望输出 为系 统 时刻的
输出 为液压阀控马达系统模糊神经元控制器 尽管
控制器中的节点和一般神经元有所不同 但其 本质也 是实
现从输入到输出的非线性映射 仿照 网络 用误差反
传的方法来设计调整参数 以使被控对象的输出逼近期望
输出
依照最速下降法修正权值
即按 对加权系数的负
梯度方向搜索调整 附加一个使搜索快速收敛的全局极小
惯性系数项 则有
1
1
式中 学习速率
103
2010年第 9期 煤炭 工 程 装备技术
中国煤炭期刊网
www.chinacaj.net
资源评论













