
基于机器视觉的工业机器人定位系统基于机器视觉的工业机器人定位系统
摘要:建立了一个主动机器视觉定位系统,用于工业机器人对零件工位的定位。采用基于区域的匹配和形状特征
识别相结合的图像处理方法,该方法经过阈值和形状判据,识别出物体特征。经实验验证,该方法能够快速准确地得
到物体的边界和质心,进行数据识别和计算,再结合机器人运动学原理控制机器人实时运动以消除此误差,满足工业
机器人自定位的要求。 1. 引言 目前工业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺
乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对工业机器
人的运动轨迹进行示教或离线编程,可节约大量的编程时间,提高生产效率和加工质量。 Hagg
摘要:建立了一个主动机器视觉定位系统,用于工业机器人对零件工位的定位。采用基于区域的匹配和形状特征识别相结
合的图像处理方法,该方法经过阈值和形状判据,识别出物体特征。经实验验证,该方法能够快速准确地得到物体的边界和质心,进
行数据识别和计算,再结合机器人运动学原理控制机器人实时运动以消除此误差,满足工业机器人自定位的要求。
1. 引言
目前工业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器
人的应用。利用机器人的视觉控制,不需要预先对工业机器人的运动轨迹进行示教或离线编程,可节约大量的编程时间,提高
生产效率和加工质量。
Hagger 等人提出通过基于机器人末端与目标物体之间的误差进行视觉反馈的方法;Mezouar 等人提出通过图像空间的路
径规划和基于图像的控制方法 。国内这方面主要应用于焊接机器人对焊缝的跟踪。
本文利用基于位置的视觉伺服思想,以六自由度垂直关节型喷涂机器人为载体,提出一种基于机器视觉的工业机器人自定
位控制方法,解决了机器人末端实际位置与期望位置相距较远的问题,改善了喷涂机器人的定位精度。
2. 视觉定位系统的组成
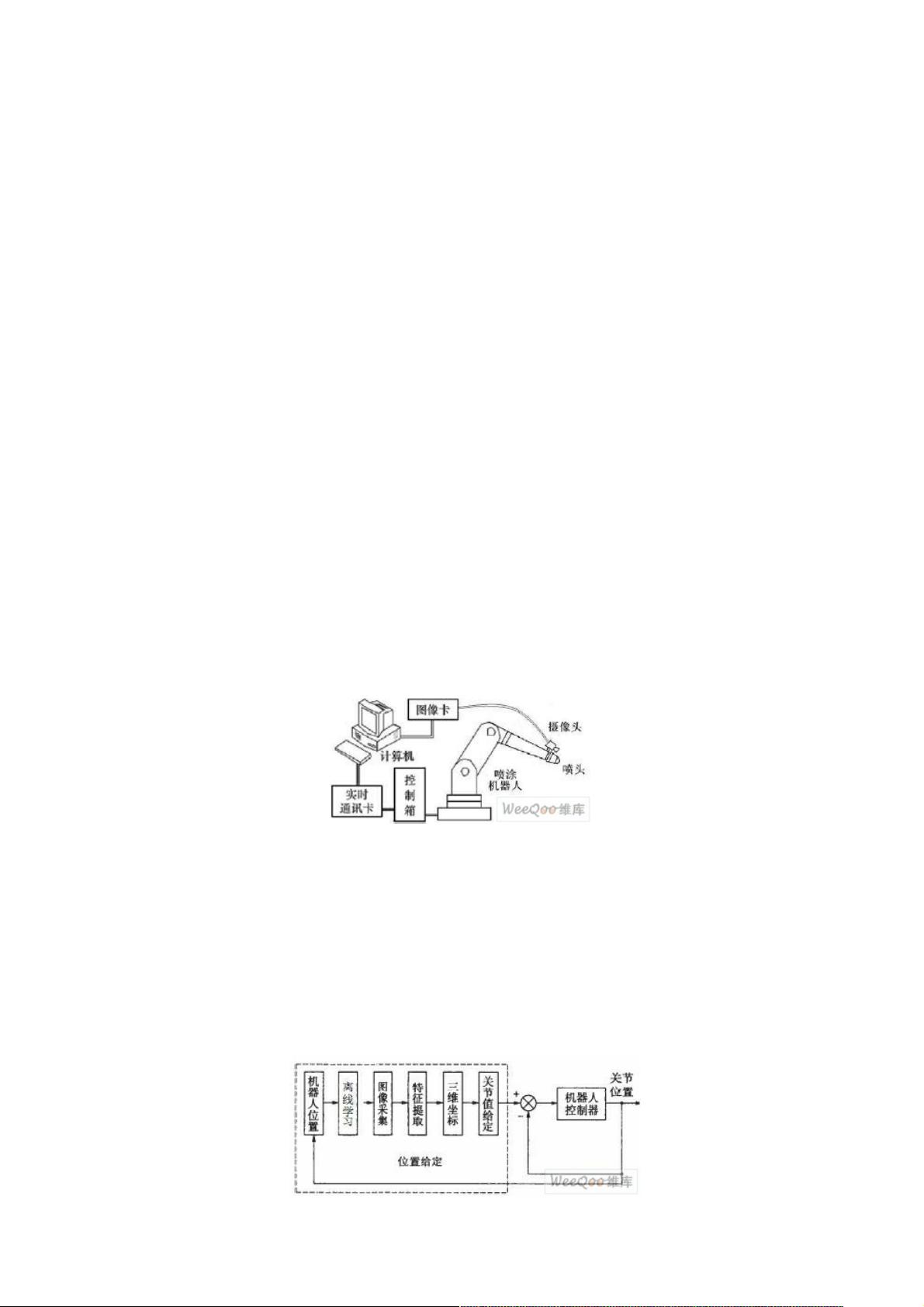
机器人视觉定位系统构成如图 1 所示,在关节型机器人末端安装喷涂工具、单个摄像机,使工件能完全出现在摄像机的
图像中。系统包括摄像机系统和控制系统:
(1)摄像机系统:由单个摄像机和计算机(包括图像采集卡)组成,负责视觉图像的采集和机器视觉算法;
(2)控制系统:由计算机和控制箱组成,用来控制机器人末端的实际位置;经 CCD 摄像机对工作区进行拍摄,计算机
通过本文使用的图像识别方法,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置误差值,控制
高精度的末端执行机构,调整机器人的位姿。
图1 喷涂机器人视觉定位系统组成
3. 视觉定位系统工作原理
3.1 视觉定位系统的工作原理
使用 CCD 摄像机和1394 系列采集卡,将视频信号输入计算机,并对其快速处理。首先选取被跟踪物体的局部图像,该
步骤相当于离线学习的过程,在图像中建立坐标系以及训练系统寻找跟踪物。学习结束后,图像卡不停地采集图像,提取跟踪
特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置给定值,控制高精度的末端执行机构,调整机器人的位
姿。工作流程如图2 所示。
图 2 视觉定位系统软件流程图
资源评论


weixin_38631331
- 粉丝: 5
- 资源: 907









最新资源
- 故障循环显示最新版,补充上一次有bug的版本
- Verilog HDL示例代码之13-进阶设计
- COMSOL二维三维岩石裂隙开度及裂隙渗透率变化模型 流固与热流固耦合均有
- C# winform 期末大作业 班级信息管理系统
- 房子数据集,意大利主要城市Airbnb房源数据
- 2-修改RustDesk客户端ID的工具
- Yolov5s.pt以及自主训练的小体量人形识别模型数据集
- 基于 C++ 的面向对象课程设计-物流管理系统源码+设计报告.zip
- 《The Last Whole Earth Catalog: Access to Tools》是一本跨时代的工具指南,被誉为20世纪的文化现象之一
- Altium Designer蚊香脚本
- (172742444)多项式拟合-参考1
- (175438820)机器学习基于yolov5的海棠花花朵检测识别项目源码+数据集+课程报告
- 2-文件快速复制工具Fast
- Nginx 1.27.1 + x86 + lua + gmssl
- (175825232)java旅游网站建设设计与实现源码.zip
- Java课程设计日历记事本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


