
树莓派树莓派 python 平衡小车平衡小车
不知不觉忙活了个把月,现在小车终于可以慢速的前进和转向。网上大部分平衡小车都是基于stm32的,但是对于我这样其他
从业者来说,树莓派python更容易上手,以后延伸其他功能也容易。
简单回归下
硬件
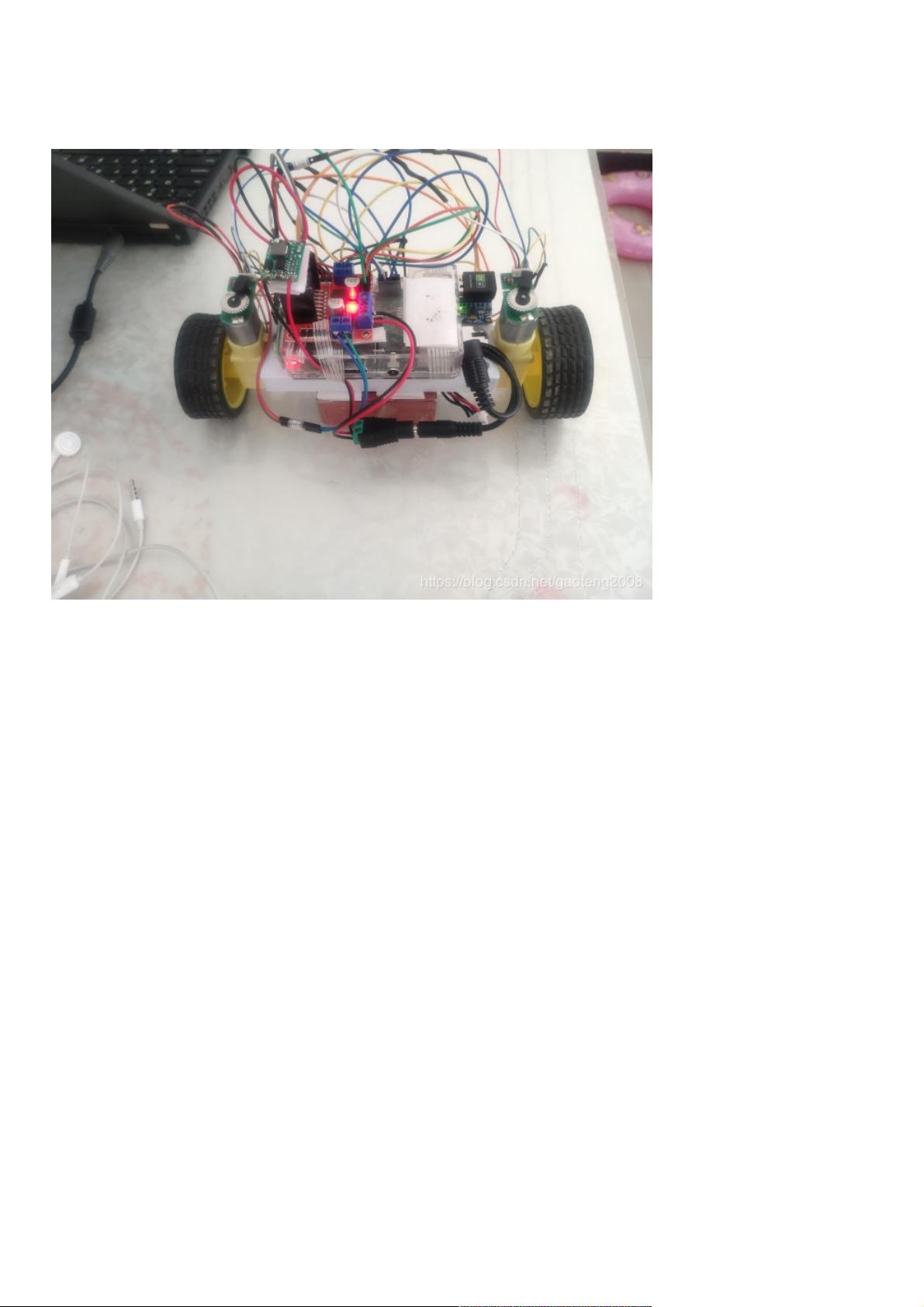
1.树莓派3b
2.mpu6050
3.L298n电机驱动,买的的6612电机驱动 因为疫情一直没有发出,不知道换上后会不会有提升
4.8811cu 双频网卡,板载的网卡不知道为什么坏了
5.DC降压模块给树莓派供电
6.带编码器130电机,现在的问题就是这个电机转速可能太低,参数是 12v 空载7800转/min,我用的1/48的减速箱,车轮理论
最大160转,但是实测才120转每分,可能就是这个原因造成小车性能弱的问题,打算买个升压模块把电压提高试试
7.电源 3串18650电池加了保护板,为什么不用航模电池,钟爱18650加保护板不怕电池短路过放
软件
1.调试mpu6050 获取角度,这个网上有很多
2.对获取的角度进行滤波,我用了简单好理解的 一阶互补滤波
angle_P=0 #计算后的角度
def yijiehubu_P(angle_m,gyro_m):
global angle_P
dt=0.005 #0.002
K1 =0.05 # K值是两则的比例
angle_P= K1 * angle_m + (1-K1) * (angle_P + gyro_m * dt)
#print(" 滤波:",str(angle_P)[:5],end='')
return angle_P
3.调试自立环,速度环,角度环待调 现在用差数转弯
def zhilihuan(y2,gyro_yout_scaled,Vout): #直立环 y2实际角度
global zl,Kp,Kd,fre,err_last,flag_stop,flag_z
print("Kp",Kp,end='')
print(" Kd",Kd,end='') #最 gy大260 1000/260=3.8(Kd) 3.
DC = Kp*(float(y2)-zl)+ Kd*gyro_yout_scaled #zl 机械中立值
DC=DC+Vout
DC=int(DC*1000) #还剩1000档,k 125 开始调试













评论1