

http://www.paper.edu.cn
- 1 -
六足步行机器人的设计
侯思雯
甘肃农业大学,兰州(730000)
E-mail:eleven-kw@163.com
摘 要:本文设计的多足步行机器人具有冗余驱动、运动拓扑的特点。为实现其步行全方位
机动性及作业多功能性,需要解决一系列的技术问题,而步态规划及控制实现是其中的关键
之一。为此,本文将围绕多足步行机器人步态生成分析、步态控制实现等问题展开研究。
首先,综合分析了现有多足机器人的步行机构。
阐述了多足步行机器人的步行运动特
点,分析了其运动学特征;接着,分析了多足步行机器人的占空系数,提出了多足步行机器
人静态步行的稳定性判定方法,规划了机器人直线行走步态、定点转弯步态,以及跨越障碍
物的行走步态。
并推导出了能适应不平地面的直线行走步态最大跨步和定点转弯步态最大
转角的计算方法;
然后,对其机械部分进行了设计计算; 最后用 PLC 实现对步态的控制。
关键词:多足步行,步态生成,静态稳定性,PLC
中图分类号:TP242.6
1 引言
步行机器人是模仿动物的运动形式,采用腿式结构来完成多种移动功能的一类特种
机器人。参照工业机器人的标准定义,可以把步行机器人理解为“一种由计算机控制的用足
机构推进的地面移动装置”以区别于行走式机械玩具及固定行走模式的机械装置。通常足数
多于或等于四的步行机器人称为多足步行机器人,该类机器人能够在不平的路面上稳定地行
走,可以取代轮式车完成在一些复杂环境中的运输作业,因此多足步行机器人在军事运输及
探测、矿山开采、水下建筑、核工业、星球探测、农业及森林采伐、教育、艺术及娱乐等许
多行业有着非常广阔的应用前景。长期以来,多足步行机器人技术一直是国内外机器人领域
研究的热点之一。为了探索多足步行机器人技术的研究前沿,给我国多足步行机器人工程实
用化开发提供关键技术的支持,开展多足步行机器人相关理论和技术的研究具有十分重要的
科学意义和应用价值。
2 多足步行机器人运动自由度的分析
步行机器人的机械部分是机器人所有控制及运动的载体,其结构特点直接决定了机器人
的运动学特征,其性能的好坏也直接决定了功能可行性
[
[
1
1
]
]
。多足步行机器人的机构系统主
要包括机器人腿部件的布局、腿部件的结构形式、腿的数量等,而其中腿部件的结构形式是
多足步行机器人机构的重要组成部分,是机械设计的关键之一。因此,从某种意义上说,对
多足步行机器人机构的分析主要集中在对其腿机构的分析。一般地,从机器人结构设计要求
看,腿机构不能过于复杂,杆件过多的腿机构形式会引起结构和传动的实现产生困难。因此
对多足步行机器人腿机构的基本要求可以归纳为:
(1)实现运动的要求;
(2)承载能力的要求;
(3)结构实现和方便控制的要求。
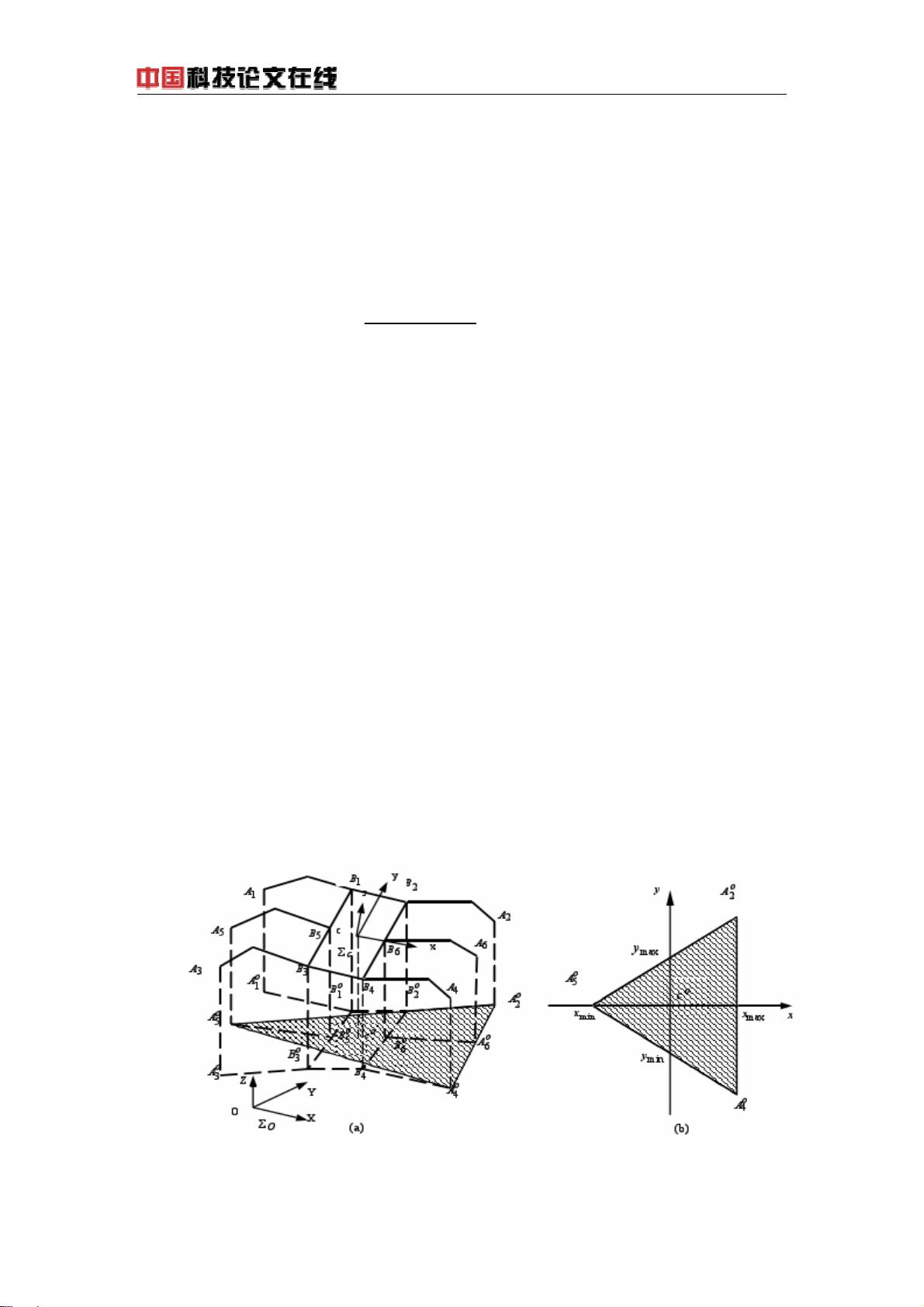
本设计采用“3+3”多足步行机器人。
剩余14页未读,继续阅读
资源评论


weixin_38624183
- 粉丝: 6
- 资源: 941









最新资源
- 英语四级考试综合训练与听力阅读翻译解析
- 三相异步电机转子磁场定向矢量控制技术及其与弱磁控制的协同优化策略,三相异步电机转子磁场定向矢量控制与弱磁控制策略探究,三相异步电机转子磁场定向矢量控制与弱磁控制 ,三相异步电机; 转子磁场定向矢量控制
- 【java毕业设计】SpringBoot+Vue自习室预约管理系统(高级版) 源码+sql脚本+论文 完整版
- 字节面试题,包括一面和二面,vue和react
- 技术博客基于MATLAB Simulink的移相变压器仿真模型,模拟实现可调移相角度的变压器副边36脉波不控整流,MATLAB Simulink仿真模型实现可设置移相角度的变压器副边36脉波不控整
- 利用Bigemap Pro缓冲区工具实现地图发光效果
- 2025 Data+AI:智能数据架构与应用最佳实践合集.pdf
- Vue生命周期详解:从初始化到销毁的关键环节与应用
- 2018 蓝桥杯C语言b组国赛真题
- 软件测试实验三1111111111111111
- 直接复制,然后粘贴到assert下面
- 基于Springboot敬老院管理系统源码+22张表+100%可以运行使用+三端19个菜单/业务功能+vue前后分离使用Maven、Spingboot等技术
- PEM电解槽仿真模型分析,基于Comsol仿真的质子交换膜电解槽多物理场耦合模型:传热、多孔介质流动与极化性能分析,质子交膜(PEM)电解槽comsol仿真模型,耦合电解槽,传热,多孔介质流动物理场
- 欧姆龙CP1H与三菱E700变频器通讯程序:实现三台变频器频率设定与读取,稳定可靠扩展功能强大,欧姆龙CP1H与三菱E700变频器通讯程序:实现三台变频器频率设定与读取,稳定可靠扩展应用,欧姆龙CP1
- COMSOL仿真研究:斜入射圆偏振高斯光与金纳米线在衬底上的相互作用-模型构建与应用,Comsol模拟研究斜入射圆偏振高斯光在金纳米线与衬底结构上的作用:应用其模型解析交互机制 ,comsol仿真斜
- 高等数学教育中几何画板课件制作的实例指导与微课教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


