
第
14
卷第
2
期
2001
年
6
月
聊城师院学报〈自然科学版〉
Journal
of
Li
aocheng
Teachers
University(Nat.
Sc
i.
)
电子电路故障诊断的模糊
Petri
网模型
侯俊勇
(四川师范学院物理系,四川南充
637002)
Vo
l.
14
No.
2
Jun.2001
摘
要
提出丁一种适用于电子电路故障诊断率统的模糊
Petri
网模型,用模糊
Petri
网表示故障
诊断的模糊知识与推理机.
关键词
电子电路,故障诊断,模糊
Petri
网,拉理机
中固分类号
TP18
文献标识码
A
文章编号
1007-8304(2001)02-0044-03
由于电子电路故障的产生和传播是一个典型的动态行为过程,因而在对电子电路状态监测与故障诊
断中,存在着很大的不确定性和模糊性,这就要求一种能合理描述知识库中知识所固有的并发性、模糊性,
可进行并行推理的模型.而模糊
Petri
网是对离散事件动态系统建模和分析的重要工具,既可以描述模糊
知识,又具有较强并行推理机制.基于此,本文提出了一种构建电子电路故障诊断系统
(EFDS)
的模糊
Petri
网模型.
l
基于模糊
Petri
网模型的知识描述
模糊
Petri
网
(FPN)
由位置和变迁组成,分别用圆圈和竖线表示,一般的
FPN
定义为
(FPN)
= (P , T ,D, 1
,
O
,j,
α
,
β)
,
其中
P={
ρ1
,如,…
,
P.}
是有限位置集合
;T=
{tl ,
tz'
… ,
t.
}是有限变迁集合
;D={
品,品,…
,
d
n
}
为有限命
题集合
;pnT
门
D=Ø
,
IPI=IDI;I
是输入函数,
0
是输出函数
.!:T
→
[O
,
lJ
表示每一变迁的可信度
(CF)
;a:P
→
[O
,
lJ
表示每一位置对命题的可信度
(CF)
;{3
:P-D
表示每一位置与命题间的映射.
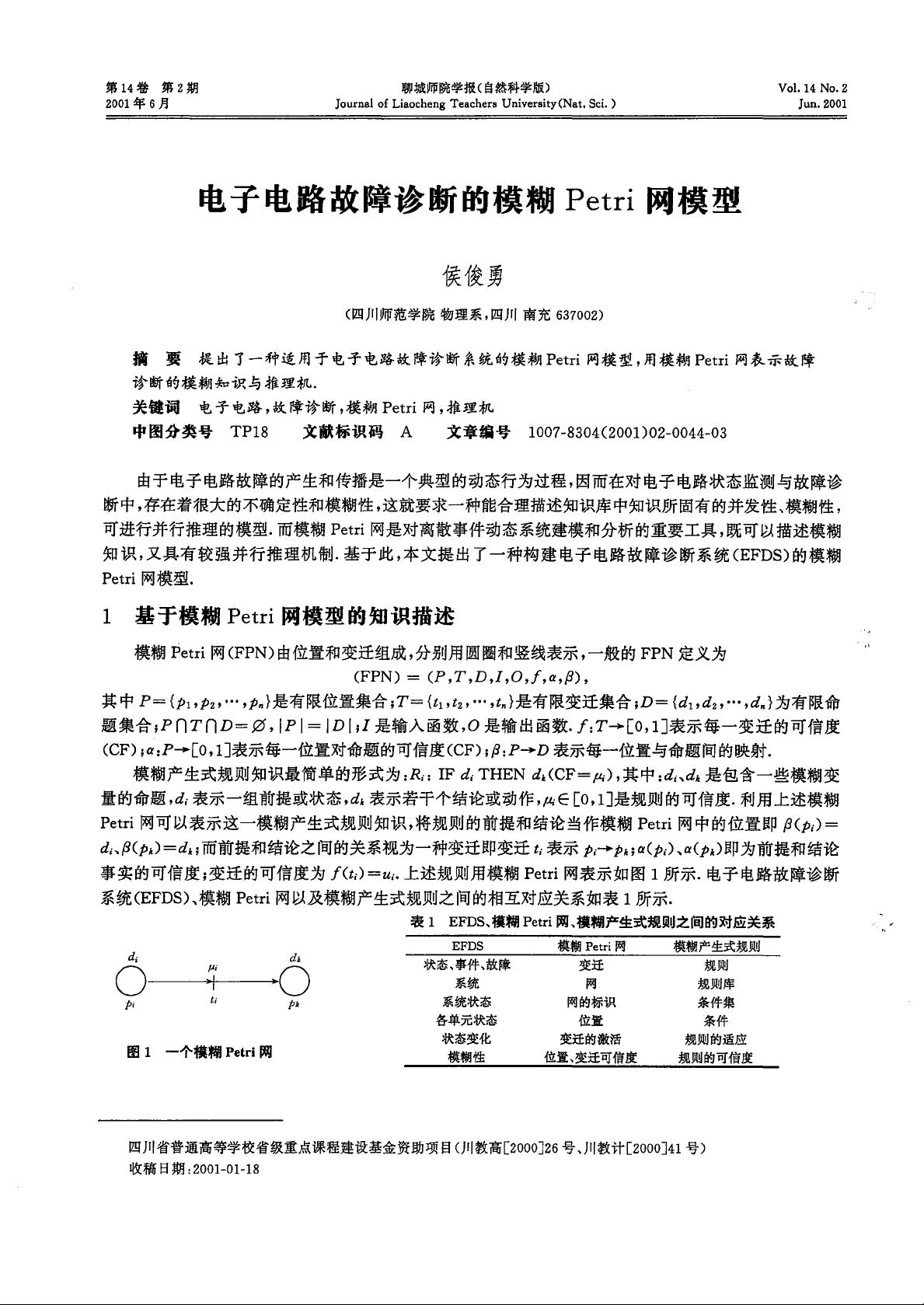
模糊产生式规则知识最简单的形式为:
R:
IF
d
i
THEN
d
1
(CF=μ)
,其中
:d
i
、码是包含一些模糊变
量的命题
,
d
i
表示一组前提或状态
,
d
1
表示若干个结论或动作,队
'ε
[O
,
lJ
是规则的可信度.利用上述模糊
Petri
网可以表示这一模糊产生式规则知识,将规则的前提和结论当作模糊
Petri
网中的位置即卢
(Pi)=
d
h
{3(
如)=功;而前提和结论之间的关系视为一种变迁即变迁
ti
表示如→
PH
α(Pi)
、
α
(Pk)
即为前提和结论
事实的可信度;变迂的可信度为
!(t;)
=Ui.
上述规则用模糊
Petri
网表示如图
1
所示.电子电路故障诊断
系统
(EFDS)
、模糊
Petri
网以及模糊产生式规则之间的相互对应关系如表
1
所示.
表
1
EFDS
、模糊
Petri
网、模糊产生式规则之间的对应关系
EFDS
模糊
Petri
网
模糊产生式规则
d
i
d.
状态、事件、故障
变迁
规则
O
μ
,
,0
系统
网
规则库
Pi
ti
户
h
系统状态
网的标识
条件集
各单元状态
位置
条件
状态变化
变迁的激活
规则的适应
固
1
-个模糊
Petri
网
模糊性
位置、变迁可信度
规则的可信度
四川省普通高等学校省级重点课程建设基金资助项目()J1教高
[2000J26
号、
JJI
教计
[2000J41
号)
收稿日期:
2001-01-18
资源评论













