
嵌入式系统嵌入式系统/ARM技术中的基于技术中的基于μC/OS-II嵌入式系统的嵌入式系统的EPA通通
信协议的实现方案信协议的实现方案
摘要: 本文提出了一种基于μC/OS-II嵌入式系统的EPA通信协议的实现方案。简要介绍了EPA通信协议和模型,
针对在以μC/OS-II嵌入式系统为平台实现EPA设备通信的需求,提出了设计思路及其构建方法,并在实验系统上
得到应用。 1. 引言 《用于工业测量与控制系统的EPA系统结构与通信规范》(以下简称EPA)是基于
工业以太网的实时通信规范,它有效地解决了以太网通信的确定性通信问题,进而可以应用于多种工业领域,
构成各种工业测量与控制系统。该规范将收录在制定中的实时以太网国际标准IEC61784-2中,成为我国首例具
有自主知识产权的现场总线标准;开发和实现EPA通信协议是应用EPA
摘要: 本文提出了一种基于μC/OS-II嵌入式系统的EPA通信协议的实现方案。简要介绍了EPA通信协议和模型,针对在以
μC/OS-II嵌入式系统为平台实现EPA设备通信的需求,提出了设计思路及其构建方法,并在实验系统上得到应用。
1. 引言
《用于工业测量与控制系统的EPA系统结构与通信规范》(以下简称EPA)是基于工业以太网的实时通信规范,它有效地
解决了以太网通信的确定性通信问题,进而可以应用于多种工业领域,构成各种工业测量与控制系统。该规范将收录在制定中
的实时以太网国际标准IEC61784-2中,成为我国首例具有自主知识产权的现场总线标准;开发和实现EPA通信协议是应用
EPA系统的基础和前提。
μC/OS-II是一种占先机制的实时多任务嵌入式操作系统,具有源码公开、可移植、可固化、可裁剪等特点,已经得到广泛
的应用。相对于同为源码公开的μClinux,它具有内核小、实时性高等特点,更适合于控制应用。μC/OS-II作为EPA通信协议
的实现平台,能够较大的提高系统资源利用率,利用优先级划分获得较好的实时响应性能,其任务间多种通信方法有助于实现
各实体协议状态机。
2. EPA通信协议与模型
EPA系统采用ISO/OSI开放系统互连模型(ISO 7498)的第一、二、三、四和七层,并增加用户层。系统中除了采用普通
以太网协议组件外,有些层增加了部分实体,以适应EPA通信的需求:
增加的用户层包含EPA功能块应用进程与非实时应用进程。应用层增加了由EPA系统管理实体、EPA应用访问实体和EPA
套接字映射实体组成的EPA协议,三个实体分别实现EPA设备管理、应用通信服务、应用层与UDP/IP软件实体之间的映射接
口和报文优先发送管理、报文封装、响应信息返回、链路状况监视等功能。在MAC层和IP层之间增加EPA通信调度管理实
体,对EPA设备向网络上发送的报文进行调度管理。调度策略采用分时发送机制,将报文分为周期报文和非周期报文,按预先
组态的调度方案,在相应的时间段内发送,以避免碰撞。各设备网络时间由时间同步组件维护其一致性。EPA管理信息库为各
层协议实体提供操作所需信息,包括设备描述对象,链接对象等。
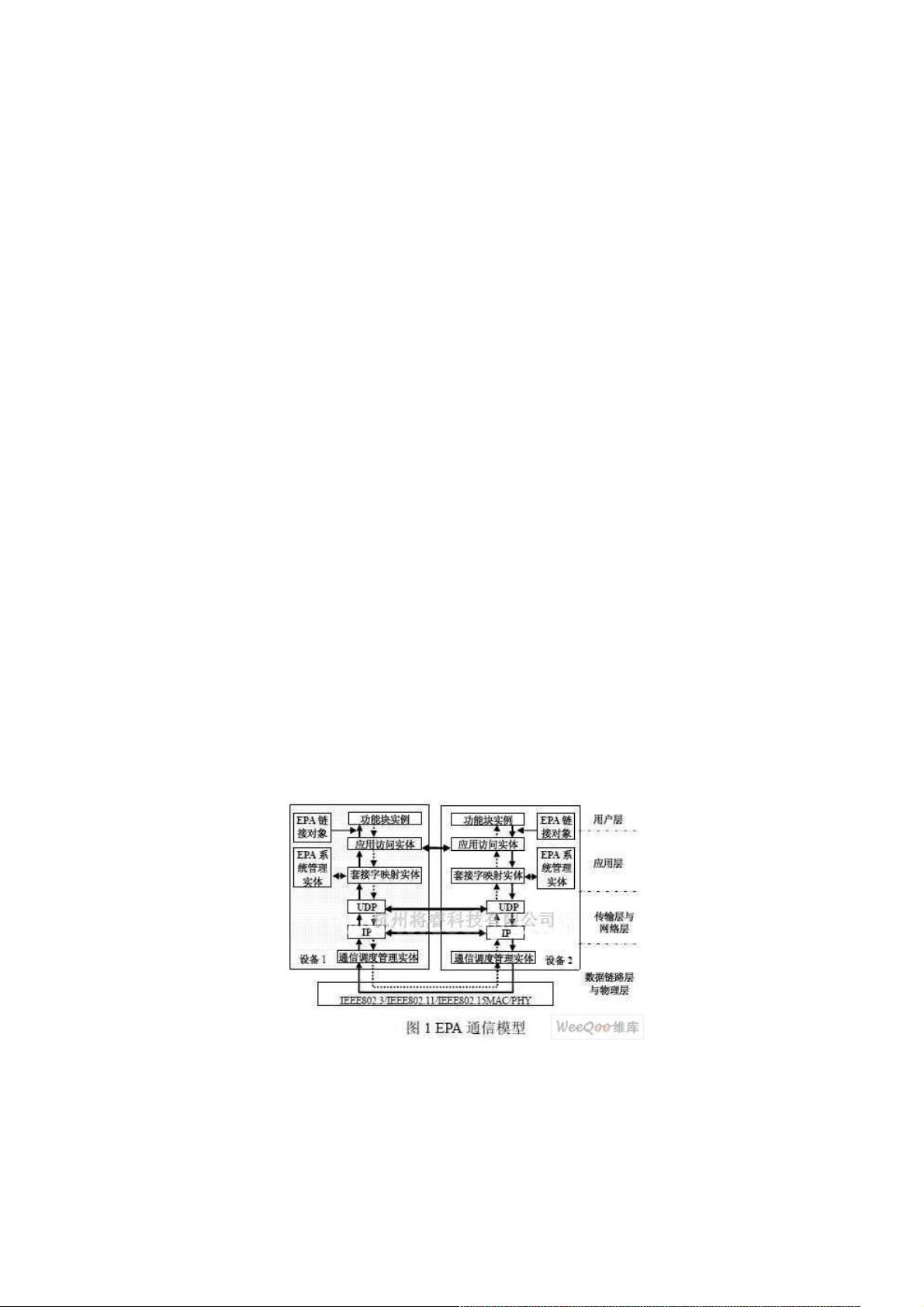
按照EPA通信协议,每个EPA设备由至少一个功能块实例、EPA应用访问实体、EPA系统管理实体、EPA套接字映射实
体、EPA链接对象、通信调度管理实体以及UDP/IP协议等几个部分组成。各个实体和对象通过互相调用,协同完成设备间通
信过程如图1示:
3. 实现平台
本文实现EPA通信协议的硬件结构如图2所示,通信卡CPU为Rabbit2000微处理器,它是Rabbit半导体公司所生产的8位
微处理器,工作主频22.1MHZ,工作电压5V,具有40个通用I/O引脚。内建日历、时钟、看门狗、定时器、多级中断、双
DMA通道,数据存储为128K静态存储器和 256K 动态存储器,可外扩4~8MB Flash,对于通信协议栈和小型控制应用,其存
储空间是足够的。






评论0
最新资源