
1
Content from this work may be used under the terms of the Creative Commons Attribution 3.0 licence. Any further distribution
of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
Published under licence by IOP Publishing Ltd
1234567890 ‘’“”
ICMCE IOP Publishing
IOP Conf. Series: Journal of Physics: Conf. Series 1016 (2018) 012006 doi :10.1088/1742-6596/1016/1/012006
A spatial registration method for navigation system
combining O-arm with spinal surgery robot
H Bai
1,2
, G L Song
1
Y W Zhao
1
X Z Liu
1,2
and Y X Jiang
1
1
Shenyang Institute of Automation, Chinese Academy of Sciences, China.
2
Northeastern University, China.
Email: songgl@sia.cn
Abstract. The minimally invasive surgery in spinal surgery has become increasingly popular
in recent years as it reduces the chances of complications during post-operation. However, the
procedure of spinal surgery is complicated and the surgical vision of minimally invasive
surgery is limited. In order to increase the quality of percutaneous pedicle screw placement, the
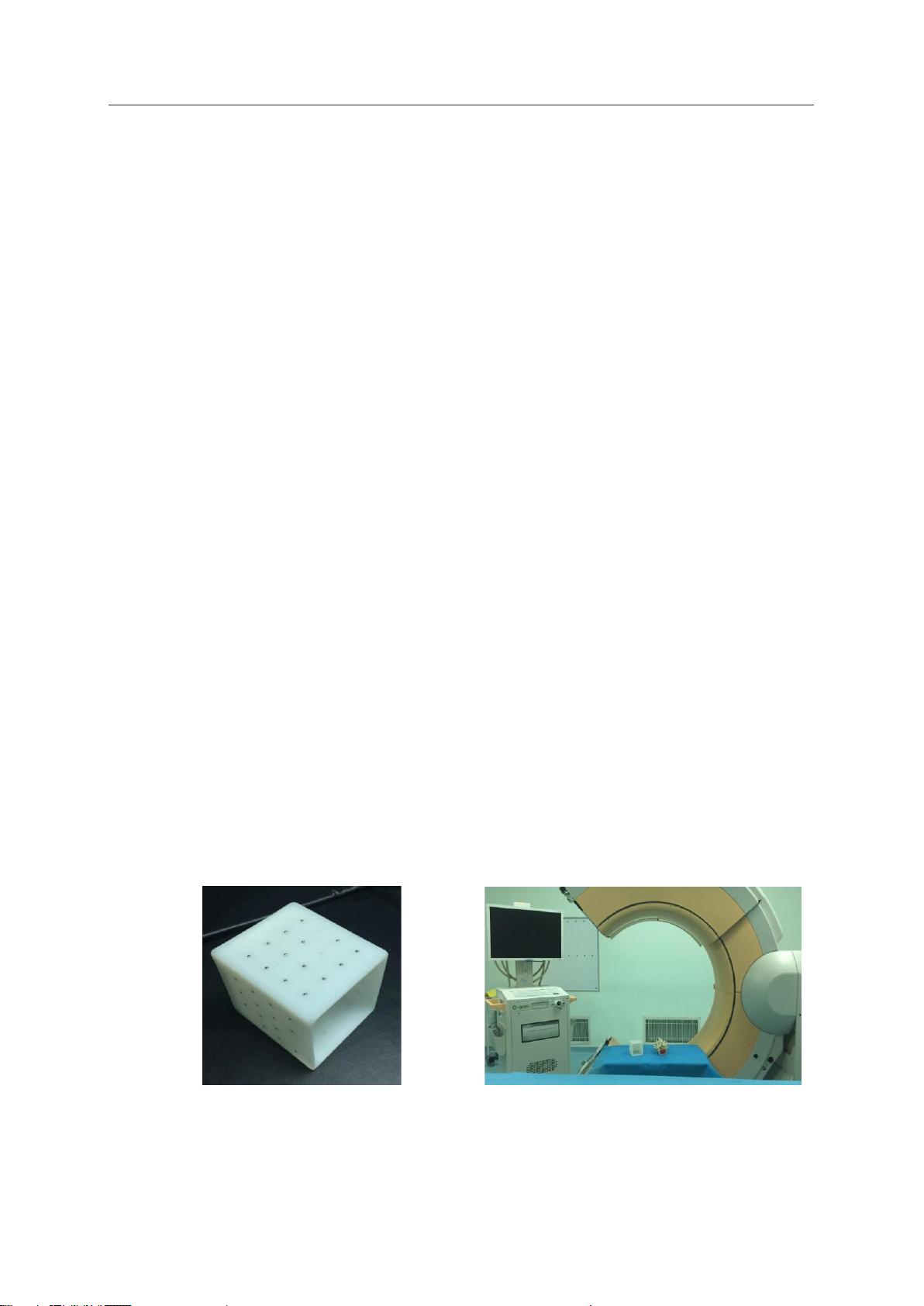
O-arm that is a mobile intraoperative imaging system is used to assist surgery. The robot
navigation system combined with O-arm is also increasing, with the extensive use of O-arm.
One of the major problems in the surgical navigation system is to associate the patient space
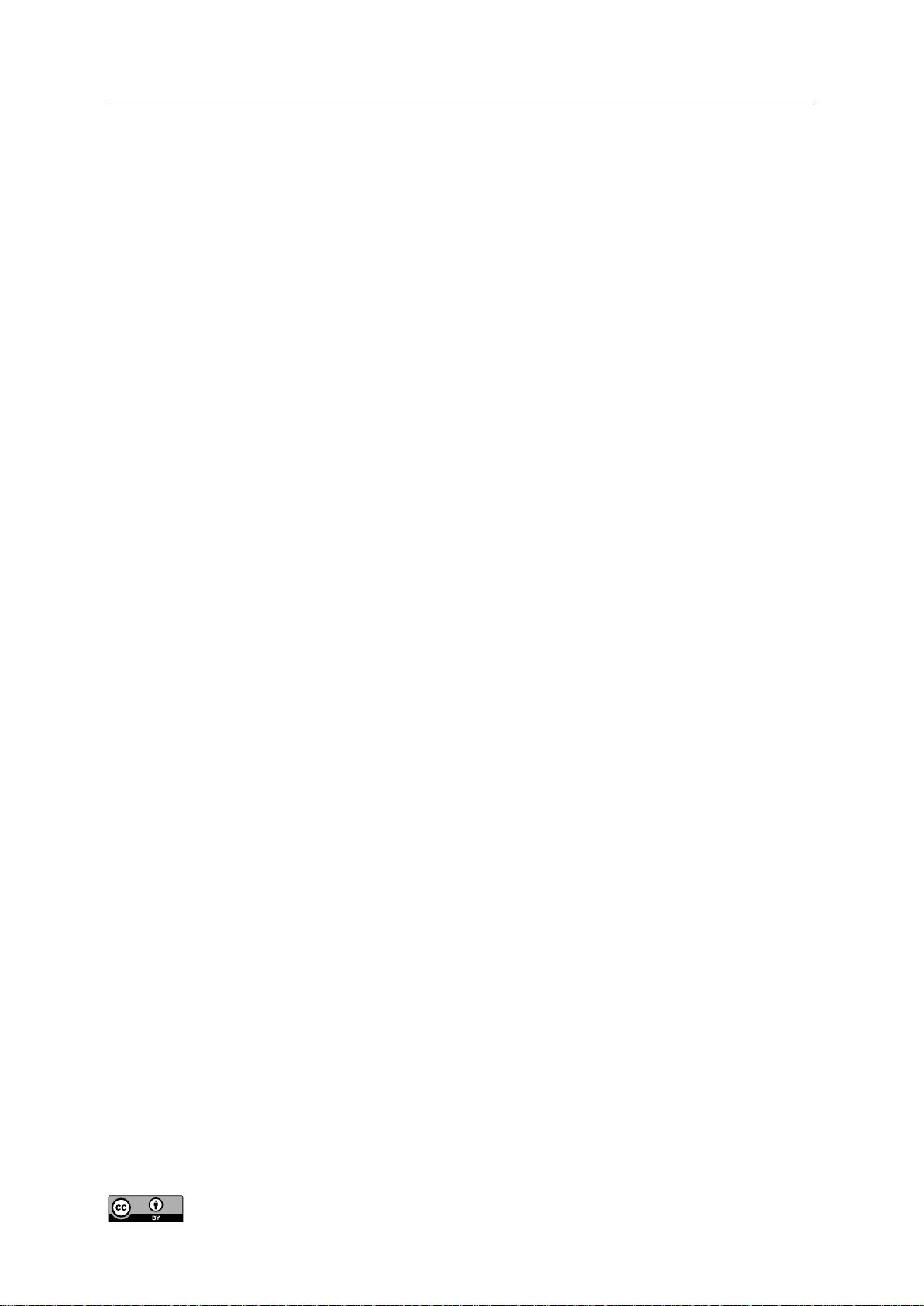
with the intra-operation image space. This study proposes a spatial registration method of
spinal surgical robot navigation system, which uses the O-arm to scan a calibration phantom
with metal calibration spheres. First, the metal artifacts were reduced in the CT slices and then
the circles in the images based on the moments invariant could be identified. Further, the
position of the calibration sphere in the image space was obtained. Moreover, the registration
matrix is obtained based on the ICP algorithm. Finally, the position error is calculated to verify
the feasibility and accuracy of the registration method.
1. Introduction
In the past two decades, minimally invasive spine surgery (MISS) has been increasingly applied and
drawn much attention in the treatment of spinal disorders[1]. The development of image technology
has led to a more significant development of minimally invasive spinal surgery. Not only can MISS
minimize injury to paraspinal back muscles, connective tissues, and joints but it can also decrease the
amount of bleeding, infection, hospital stay, and postoperative pain[2].It decreases the incidence of
complications and approach-related morbidity and mortality associated with conventional open
surgery. The traditional open spine surgery has gradually been replaced with MISS. According to the
reports[1], the number of MISS conducted in 2010 accounted for 1/6 of the total number of all spine
surgeries in the United States and 1/3 in 2016, which is anticipated to be more than 1/2 in 2020.
Although MISS has the above advantages, it still faces to the following problems: (1) Surgeon's
surgical vision is limited. (2) With the increasing number of surgery, the surgeon's intra-operative
radiation exposure will accumulate. (3) The lack of surgical instrument's real-time position, reduces
the safety of surgical procedures.
In order to solve the above problems, some scholars have proposed that the robot navigation
technology could assist surgeons. A study assessed the feasibility and clinical value of robot assisted
navigation drilling for pedicle screw placement and the results confirmed that robot assisted surgery
could increase the quality of percutaneous pedicle screw placement[3]. The accuracy of guidance
systems in screw insertion procedures is particularly notable in anatomically difficult cases, such as
剩余6页未读,继续阅读
资源评论


weixin_38579899
- 粉丝: 2
- 资源: 979









最新资源
- 西门子S7-300博途植物萃取饮料生产线控制系统程序案例,编程软件采用博途STEP7加博途WINCC RT Pro 内有CAD工艺流程图和PDF版电气图供参考 博图版本V15.1及以上
- 西门子S7-1200博图程序案例,具体为一个3轴伺服螺丝机程序,画面采用西门子KTP700组态,程序语言采用SCL,程序结构清晰,写法十分经典,参考价值高 ,打开版本TIA V14及以上
- 西门子PLC1200伺服库卡机器人12工位博图程序例程,组态采用昆仑通态触摸屏,详细中文注释,PDF电路图参考,设备操作说明,物料BOM ,PLC和一台库卡机器人profinet通讯 PTO模式控制
- 西门子PLC-PVC送料配料系统控制程序画面实例,结构采用S7-314C+Wincc 程序内容包括1.配料系统物料分配 2.模拟量转,监测压力,称重程序, 3.PROFI
- 合资品牌汽车尾翼组装线(sw16可编辑+工程图+bom)全套技术资料100%好用.zip
- 147-西门子S7-1200博图程序案例, PID 恒温恒压供冷却水程序.触摸屏画面TP1200组态 霍尼韦尔电动比例阀PID控制水温,与两台西门子v20变频器模拟量PID控制水压 包括程序和Ep
- No.943 基于S7-300 PLC和Wincc Flexible触摸屏温室大棚控制 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- FX5U程序框架模板(10轴) 程序由老工程师费尽心力的整理,把控制允许整理成简单的模板架构程序 程序讲解 1 轴的参数初始化 2 自动启动条件 3 安全条件(台湾称许可条件,这个可以避免运动打架
- 2022最新款程序,切条机切带机选用中达优控定长送料触摸屏一体机程序 三菱work2编辑软件,能用于超声切带和热切 配有触摸屏软件 送料方式可以自由选择,根据实际切长的用夹手加滚筒送料,切短的用滚
- 三相三电平PWM整流器闭环控制策略,采用三电平SVPWM算法
- 二极管箝位型三电平逆变器,NPC三电平逆变器 主要难点:三电平空间矢量调制(SVPWM),中点电位平衡调制等 MATLAB Simulink仿真模型,可提供参考文献
- 基于PLC的三部十层群控电梯,采用博途编写,提供程序,画面,接线图,设计报告,以及PPT,详情见图 需要的话,点击“加好友”和我加好友吧比心
- BootLoader IAP 上位机使用C#语言编程,下位机以STM32 系列为例,方便移植到其他厂家的MCU芯片,采用YModem协议传输文件 实现完成一键下载,含有上位机源码及MCU源码 企业
- 基于plc的污水处理厂控制系统,全部采用博途仿真完成,提供程序,画面,接线图.流程图,报告,PPT等相关文档 最终运行效果,详见上方演示视频
- fx5u 完整项目案例 包含触摸屏 ,6路脉冲控制 程序简单 适合新手学习
- Mitsubishi 三菱电机马达PMSM电机负载观测转矩前馈simulink 基于Luenberger降阶状态观测器,包含PMSM数学模型,PMSM双闭环PI矢量控制,并添加了前馈控制,采用SVP
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


