
第
35
卷第
4
期
2010
年
4
月
武汉大学学报·信息科学版
Geomatics
and
Information
Science
of
W
uhan
University
Vo
l.
35
No.4
Ap
r.
2010
文章编号
:1671-8860(2010)04-0432-04
文献标志码
:A
基于
LiDAR
点二支数据的水体轮廓线提取方法研究
王宗跃1,
2
马洪超
2
徐宏根
3
彭检贵
2
cl
集美大学计算机工程学院.厦门市集美区银江路
185
号
.361021)
(2
武汉大学遥感信息
1
程学院.武汉市珞喻路
129
号,
430079)
(3
中国国土资源航空物探遥感中心.北京市海淀区学院路
31
号
.100083)
摘
要:提出一种基于机载激光霄达点云数据提取水体轮廓线的方法。采用双层格网模式提取较窄的水休;
以朝向水体的边界点作为拟合轮廓线的关键点提取更精确的轮廓线。实验表明,该方法可以较好地提取水体
轮廓线。
关键词
:LiDAR
点云;水体;轮廓线;种子填充:连通域
中图法分类号
:P237.4
国内外学者提出了多种从遥感影像中提取
水体的方法,如阔值法、差值法、比值法、密度分割
法、色度判别法、比率测算法、谱间关系法以及基
于知识的水体自动判别方法和根据形状信息进行
水体识别与分类方法等
[1-6J
遥感影像数据的质
量易受天气影响,而机载激光雷达系统本身是一
个主动系统,从理论上来讲,可以全天候工作,受
到天气的影响较小时。直接利用
LiDAR
数据提
取水体的研究还很少,
Brzank
等分析了水体在
LiDAR
数据中所呈现出的特征,通过监督分类区
分水体和温泥地,提取水体和结构线[足。本文提
出了一种考虑周围场景的水体轮廓线提取方法,
先用严格条件初步定位水体位置,再从已定位的
水体位置(也只从这些位置)出发进行种子填充全
部水体。
1
基于
LiDAR
点云数据的水体提取
1.
1
基本原理
在机载激光雷达数据中,水体所在区域的点
云具有如下
4
个特征:①激光点稀疏;②高程相
近,设
D;
为第
1
块点云高程均方差,若
D;<
卢,则
该块高程相近;③回波强度弱
10;
④水面低于
周围陆地。本文设计了两种判断水面低于周围陆
地的方法:①直接比较法,先分别求出水面和周
收稿日期
:2010
一
01-20
。
围地面的平均高程,直接判断这两种高程的大小
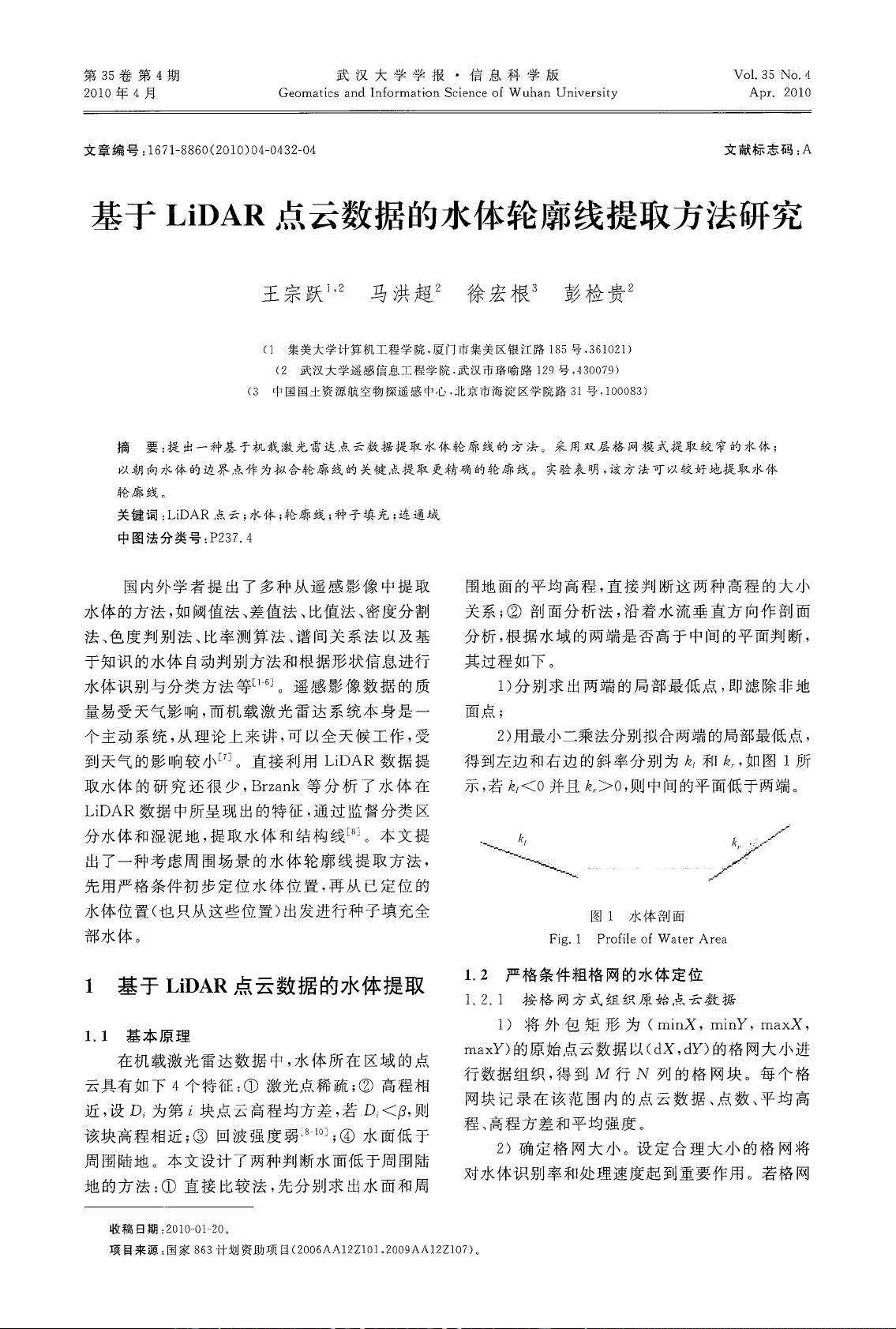
关系;②剖面分析法,沿着水流垂直方向作剖面
分析,根据水域的两端是否高于中间的平面判断,
其过程如下。
1)分别求出两端的局部最低点,即滤除非地
面点;
2)
用最小二乘法分别拟合两端的局部最低点,
得到左边和右边的斜率分别为
ι
和
ι
,如图
l
所
示,若走,
<0
并且走,
>0
,则中间的平面低于两端。
'飞
k/
~
『飞、
.-
.......
气钊"、电
"、"-气-
Y
./'
图
l
水体剖面
Fig.1 Profile
of
Water
Area
1.
2
严格条件粗格网的水体定位
..
/~
二/
1.
2.
1
按格网方式组织原始点云数据
1)将外包矩形为(
minX
,
minY
,
maxX
,
maxY)
的原始点云数据以
(dX
,
dY)
的格网大小进
行数据组织,得到
M
行
N
列的格网块。每个格
网块记录在该范围内的点云数据、点数、平均高
程、高程方差和平均强度。
2)
确定格网大小。设定合理大小的格网将
对水体识别率和处理速度起到重要作用。若格网
项目来源·国家
863
计划资助项目
(2006
八八
122101.2009
八八
122107)
0
资源评论


weixin_38576779
- 粉丝: 9
- 资源: 927









最新资源
- 基于java的宿舍管理系统设计与实现.docx
- 基于java的汽车租赁管理系统设计与实现.docx
- 基于java的图书大厦图书管理系统的设计与实现.docx
- 基于java的网购平台管理系统设计与实现.docx
- 基于java的文学创作的社交论坛设计与实现.docx
- 基于java的图书管理系统设计与实现.docx
- 基于小程序的论坛小程序源码(小程序毕业设计完整源码).zip
- 基于java的校车调度管理系统设计与实现.docx
- 基于java的校园便利平台设计与实现.docx
- 基于java的小区物业管理系统设计与实现.docx
- 基于java的学院个人信息管理系统设计与实现.docx
- 基于java的协同过滤算法的私人诊设计与实现.docx
- 烟花模拟器,一个模拟放烟花的网页
- 基于java的校园一卡通设计与实现.docx
- 基于java的医院病历管理系统设计与实现.docx
- 基于java的一款基于BS的美食网站的设计与实现.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


