

Research Article
Wavelet Adaptive Algorithm and Its Application to
MRE Noise Control System
Zhang Yulin and Zhao Xiuyang
School of Information Science and Engineering, University of Jinan, Jinan 250022, China
Correspondence should be addressed to Zhao Xiuyang; zhaoxy@ujn.edu.cn
Received January ; Accepted March
Academic Editor: Seung-Bok Choi
Copyright © Z. Yulin and Z. Xiuyang. is is an open access article distributed under the Creative Commons Attribution
License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly
cited.
To address the limitation of conventional adaptive algorithm used for active noise control (ANC) system, this paper proposed and
studied two adaptive algorithms based on Wavelet. e twos are applied to a noise control system including magnetorheological
elastomers (MRE), which is a smart viscoelastic material characterized by a complex modulus dependent on vibration frequency
and controllable by external magnetic elds. Simulation results reveal that the Decomposition LMS algorithm (D-LMS) and
Decomposition and Reconstruction LMS algorithm (DR-LMS) based on Wavelet can signicantly improve the noise reduction
performance of MRE control system compared with traditional LMS algorithm.
1. Introduction
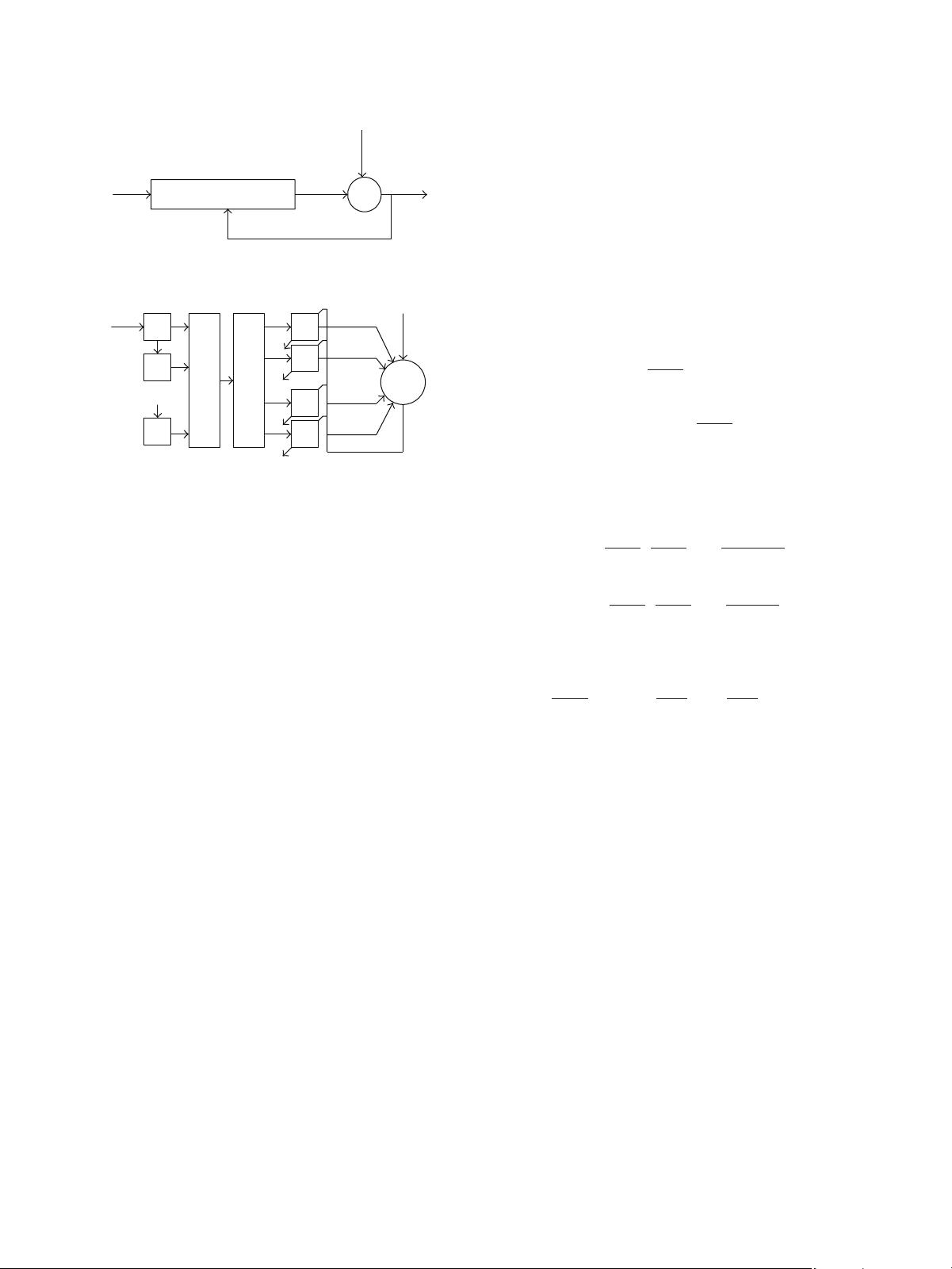
e most popular algorithm used to adapt FIR lters is
the Widrow-Ho LMS [], which is shown in Figure .Its
popularity is due to its low computational complexity and
robustness to implementation errors.
As in Figure , (), (), (),and()denote the refer-
ence of system, disturbance, control error, and control signal,
respectively. e system control signal can be expressed as
(
)
=
𝑇
(
)
(
)
,
()
where ()=[
0
,
1
,...,
𝑁−1
]
𝑇
istheweightvectorofthe
order control lter,
𝑇
()=()∑
𝑁−1
𝑖=0
−𝑖
,anddenotes
the vectors transpose. e goal is to minimize the output
error:
(
)
=
(
)
−
(
)
.
()
According to the Widrow-Ho LMS algorithm [], the
weightofcontrolltercanbeadjustedby
(
+1
)
=
(
)
+2
(
)
(
)
,
()
where is the step-size parameter. e convergence rate
of this algorithm depends on the condition numbers of
the autocorrelation
𝑥
of the reference signal. When the
eigenvalues of
𝑥
arewidelyspread,theexcessmeansquare
error produced by LMS algorithm is primarily determined by
the largest eigenvalue, and the time taken by the average tap-
weight vector [
()]to converge is limited by the smallest
eigenvalue. However, the speed of convergence of the mean
square error is aected by the spread of the eigenvalues of
𝑥
.
e speed of convergence of the LMS algorithm may
slow down when the correlation matrix of the inputs is
ill-conditioned, which implies that the control system with
Widrow-Ho LMS adaptive algorithm might become unsta-
ble when inputs change indenitely. In order to enhance
the performance of the algorithm, Wavelet Transform is
proposed in this study due to its time-frequency localization
[, ]. is paper presents two kinds of adaptive wavelet
algorithm: Decomposition LMS algorithm (D-LMS) and
Decomposition and Reconstruction LMS algorithm (DR-
LMS).
2. Decomposition LMS Algorithm (D-LMS)
In D-LMS algorithm, the input signal is decomposed
into various wavelet spaces according to various scales to
form the input vector, and then the adaptive lter weight
Hindawi Publishing Corporation
Shock and Vibration
Volume 2015, Article ID 968082, 8 pages
http://dx.doi.org/10.1155/2015/968082
剩余8页未读,继续阅读
资源评论


weixin_38565801
- 粉丝: 3
- 资源: 970









最新资源
- deepseek 与 ChatGPT 的比较.pdf
- 开关电源变压器设计-卢经纬.pdf
- DeepSeek-VL2:用于高级多模态理解的专家混合视觉语言模型.pdf
- DeepSeek 提示词编写技巧.pdf
- MAME模拟器二进制软件
- DeepSeek的启示:地方如何培育创新.pdf
- DeepSeek官方服务器无法使用的替代方案指南.pdf
- DeepSeek常用高级指令 -60个 保姆级指令.pdf
- Deepseek满血版私用部署手把手教程.pdf
- DeepSeek强势崛起:AI创新狂潮下的安全警钟.pdf
- DeepSeek如何赋能职场应用?——从提示语技巧到多场景应用.pdf
- deepseek私域部署指南 -应用-接入-部署大全.pdf
- DeepSeek行业级应用白皮书 精准数据洞察与自动化效能提升方法论.pdf
- DeepSeek行业应用案例集:解锁智能变革密码.pdf
- DeepSeek与AI幻觉研究报告.pdf
- 一文读懂MongoDB之单机模式搭建
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


