

第
46
卷第
4
期
2014
年
8
月
南京航空航天大学学报
Journal
of
Nan
jin
g
Un
i
versity
of
Aeronautics
&
Astronautics
压电叠堆主动减振的神经网络
PID
实时控制
陈万华
1
,
2
王元兴
2
沈
星
3
聂旭涛
2
黎壮声
2
(1.
中国
空气动
力研究与发展中心
空气动
力学国家重点实验
室,绵
阳,
621
000;
2.
中国空气动力研究与发展中心,绵阳,
621000;
3.
南京航空航天大学机械结构力学及控制国家重点实验室,南京,
210016)
Vo
l.
46
No
. 4
Aug. 2014
摘要:为
实现对带有模型尾支杆支挎系统在吹风过程中振动特性的实时控制,以压电陶瓷叠堆为减振元件设计
了尾支杆一体化结构;提出了神经网络
P1D(
Proportion-i nt
eg
ra tion-differentia
tion)
实时控制方法,建立了该尾支
杆一体化结构的运动方程,推导出神经网络进行系统识别的状态方程,以此为基础进行控制器的设计并基于
L
a
bview
软件编写控制程序;最后在风洞中,对该控制方法的控制效采进行了试验验证
。
试验表明利用该控制
系统可进行实时控制;对不同风这下激励的振动,控制后的均方根幅值
(Root
m
ea
n
sq
uare,
RMS)
减小
55%
以
上,且该控制方法具有良好的鲁棒性、可
靠性和容错性。
关键词:
实时控制;压电陶瓷叠堆
;P
lD神经网络;主动减振
中图分类号
:
TP21
文献标志码
:
A
文章编号:
1005-2615(2014)04-0587-
07
Neural
Network
PID
Real-Time
Control
for
Active
Vibration
Reduction
Using Piezoceramics Stacks
Chen
Wanhu
α
1.
2
Wang
Yuanxing
2
,
Shen
Xing
3
,
Nie
Xutao
2
,
Li
Zhuangsheng
2
(1. State K
ey
Laboratory of Aerodynamics, China Aerodynami
cs
Research and Development Center ,
Mi
a
ny
a
口,
621000 , China;
2.
China Aerodynamics Resear
ch
and Development Center, Mianyang, 621000 , China;
3.
State Key Laboratory of M
ec
ha
nic
s
a
口
d
Control of Mechanical Structures, Nar>jing University
of Aeronauti
cs
&.
Astronautics ,
Na
njng , 210016 , China)
Abstract:
To
contro
l
vibrat
i
on
of
support
cant
il
ever
installed
model
in
rea
l
time
in
wind
tunne
l , a
sup
port
cant
il
ever
structure
integrat
ed
with
piezoceramics
stacks
,
us
ed
as
damping
el
ements
, is
des
i
gned
.
And
a
neura
l
network
proportion
-i
ntegration
-diff
erentiation
(PID)
rea
l-
time
contro
l
method
is
proposed.
T
h
巳
dynamics
equation
of
the
support
cant
il
ever
is
estab
li
shed
,
and
the
state
equat
i
on
for
system
identi
fication
is
deduced
through
the
neural
network.
After
that
,
the
contro
ll
er
is
designed
and
rea
li
zed
by
programming
b
ase
d
on
Labview
software
.
Finally
,
the
exper
im
ents
in
wind
tunne
l
are
implemented
to
va
lid
ate
the
effectiveness
of
the
contro
llin
g
method.
The
expe
rimental
results
indicate
that
real
-
time
vi
bration
reduction
can
be
executed
by
t he
control
system
.
For
vibrations
excited
in
wind
tunne
l
at
diff
er
ent
w
ind
speeds
,
the
root
mean
square
(RMS)
amp
li
tudes
of
vibrations
are
decreased
by
more
than
55
%
using
the
contro
l
system
in
rea
l
time
.
The
contro
l m
et
hod
is
possessed
of
robustness
,
re
li
abi
li
ty
and
faul
t-
to
l
erance
.
Key
words:
real-time
contro
l;
piezoceramics
stacks;
PID
neural
network;
active
v
ib
rat
i
on
reduction
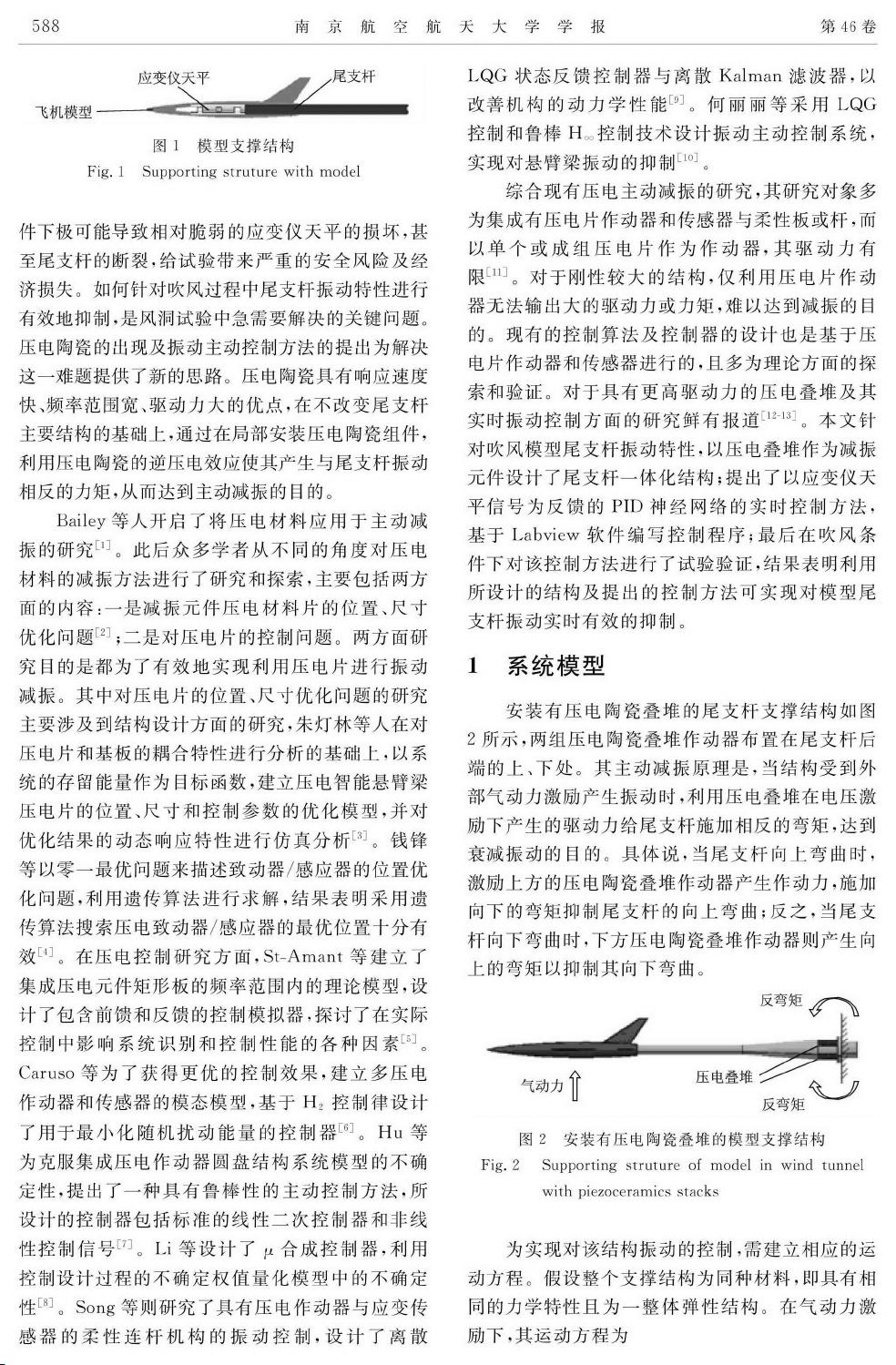
在大多数的风洞试验中,吹风模型及其支撑系
统构成了
一
弹性悬臂梁结构,
主要
包括试验模型、
应变仪天平、尾支杆等(如图
l
所示)。在吹风试验
时
,由于气动力是一宽频激励载荷,很容易引起该
支撑系统产
生共振
。
如果振动幅度过大、频
率过高
,
这不仅严重影响试验数据的准确性,而且在共振条
基金项目:
空气动
力学国家重点
实验室基金
(S
KLA2
009
A0
103)
资
助项目
青蓝工程"资
助项目
。
收稿日期:
2013
-
07
-
20;
修订日期:
2013-
09
-
11
通信作者:
沈星,男,教授,博士生导师,
E-mail:
s
h
e
nx
@
nuaa.
ed
u.cn
。
剩余7页未读,继续阅读
资源评论


weixin_38553275
- 粉丝: 5
- 资源: 917









最新资源
- (174808034)webgis课程设计文件
- (177121232)windows电脑下载OpenHarmony鸿蒙命令行工具hdc-std
- (177269606)使用Taro开发鸿蒙原生应用.zip
- (170644008)Eclipse+MySql+JavaSwing选课成绩管理系统
- (14173842)条形码例子
- (176419244)订餐系统-小程序.zip
- Java Web实现电子购物系统
- (30485858)SSM(Spring+springmvc+mybatis)项目实例.zip
- (172760630)数据结构课程设计文档1
- 基于simulink的悬架仿真模型,有主动悬架被动悬架天棚控制半主动悬架 1基于pid控制的四自由度主被动悬架仿真模型 2基于模糊控制的二自由度仿真模型,对比pid控制对比被动控制,的比较说明
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


