
书书书
第 9卷第 5期
智 能 系 统 学 报
Vol.9№.5
2014年 10月
CAAITransactionsonIntelligentSystems
Oct.2014
DOI:10.3969/j.issn.16734785.201304003
动力学解析的四轮全向移动机器人电机解耦控制
王建彬
1
,陈建平
2
,杨宜民
1
(1.广东工业大学 自动化学院,广东 广州 510090;2.肇庆学院 计算机学院,广东 肇庆 526061)
摘 要:四轮全向移动机器人是一个复杂的非线性、强耦合的机械系统,各轮驱动电机间存在强耦合现象,很难取得
理想的控制效果。针对这一问题,提出一种基于动力学解析的多电机控制系统解耦方法。通过对四轮机器人的动
力学解析推导出四轮转速与其驱动力矩间的状态方程,获得各电机输入输出量之间的耦合关系,在此基础上依据控
制量一致思想设计解耦控制器,解决了传统参考模型解耦方法不能兼顾控制性能和解耦性能的问题,实现了四路电
机的独立控制。仿真结果显示,该方法能够有效地减小控制系统各变量间的相互耦合作用,每路电机均很好地跟踪
了各自的输入,解耦效果好。
关键词:全向移动机器人;动力学解析;解耦控制;电机控制;运动控制
中图分类号:TP273 文献标志码:A 文章编号:16734785(2014)05056908
中文引用格式:王建彬,陈建平,杨宜民.动力学解析的四轮全向移动机器人电机解耦控制[J].智能系统学报,2014,9(5):569
576.
英文引用格式:WANGJianbin,CHENJianping,YANG Yimin.Motordecouplingcontrolforfourwheelomnidirectionalmobilero
botbasedondynamicanalysis[J].CAAITransactionsonIntelligentSystems,2014,9(5):569576.
Motordecouplingcontrolforfourwheelomnidirectional
mobilerobotbasedondynamicanalysis
WANGJianbin
1
,CHENJianping
2
,YANGYimin
1
(1.SchoolofAutomation,GuangdongUniversityofTechnology,Guangzhou510090,China;2.SchoolofComputerScience,Zhaoqing
University,Zhaoqing526061,China)
Abstract:Anfourwheelomnidirectionalmobilerobotisacomplicatednonlinearstrongcouplingmechanicalsys
tem.Sincethestrongcouplingphenomenaexistbetweenwheeldrivenmotors,itisdifficulttoobtainidealcontrol
effect.Inordertosolvethisproblem,adecouplingmethodformultimotorcontrolbasedondynamicanalysisis
raisedinthispaper.Throughdynamicanalysisofthefourwheelrobot,thestateequationbetweenthefourwheels’
speedandthedrivingmomentisderived,andthecouplingrelationsbetweeninputandoutputvariablesofmotors
areobtained.Furthermore,thedecouplingcontrollerisdesignedaccordingtotheconsistencyideaofcontrolledvari
ables.Comparedwithdecouplingcontrolofthetraditionalreferencemodel,thenewcontrollermeetsbothcontrol
linganddecouplingperformance,achievingindependentcontroloffourmotors.Simulationresultsshowedthatthe
methodcaneffectivelyreducethecouplinginteractionbetweenthecontrolvariables.Eachmotorcanalsotrackits
owninput,showinggoodtrackingdecouplingeffect.
Keywords:omnidirectionalmobilerobots;dynamicanalysis;decouplingcontrol;motorcontrol;motioncontrol
收稿日期:20130401.
基金项目:广东省自然科学基金资助项目(S2011010004006);广东省教
育部产学研结合资助项目(2012B091100423);肇庆市科技计
划资助项目(2010F006);肇庆学院科研启 动基金 资助项 目
(2012BS01).
通信作者:陈建平.Email:jpchen@zqu.edu.cn.
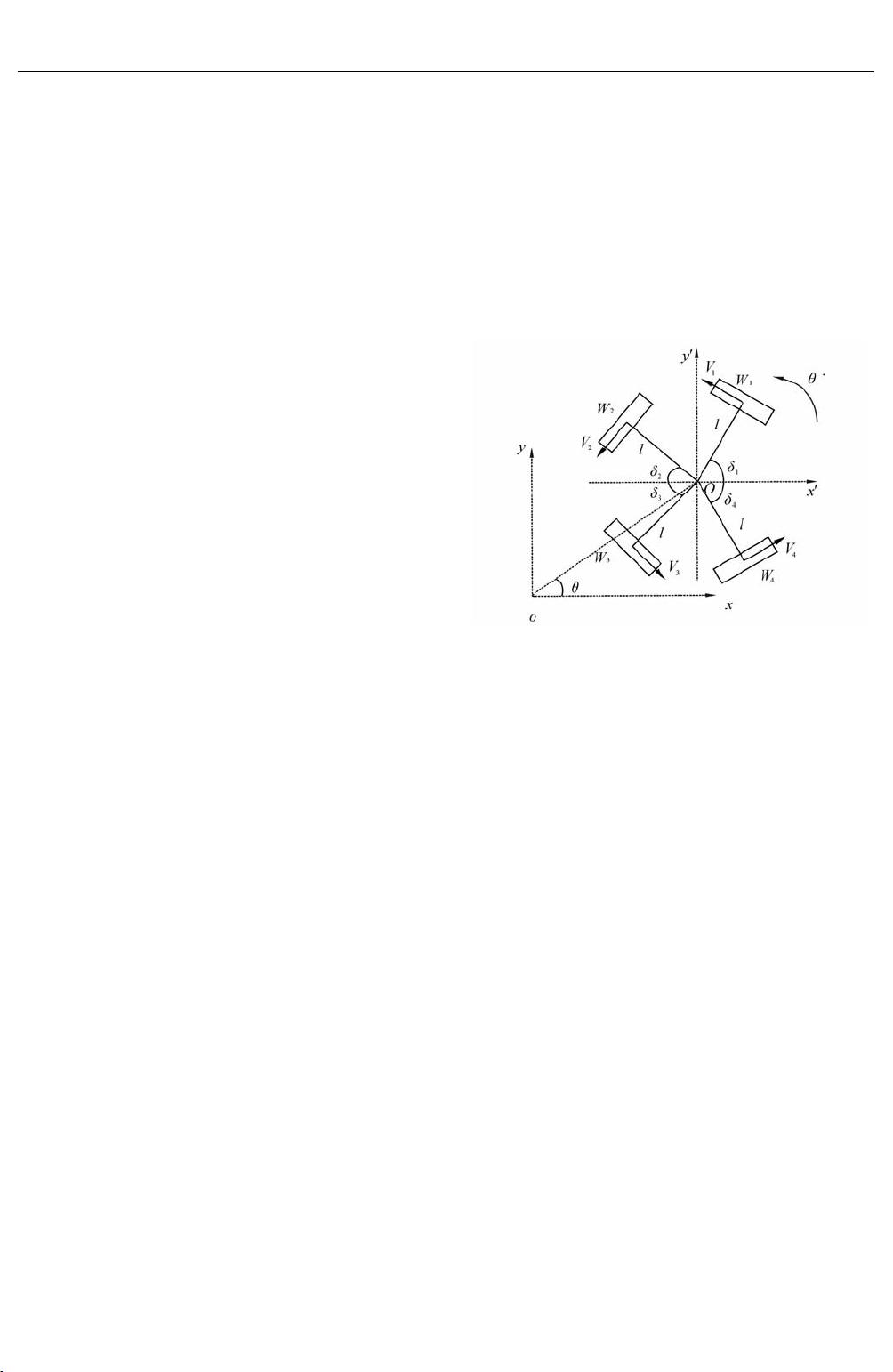
全向移动机器人运动灵活,凭借着不改变位姿
就可以向任意方向移动的独特运动优势,已经被广
泛应用于人类的生产、生活实践中
[1]
。由于四轮全
向移动机器人是一个结构复杂、强耦合、非线性的机
剩余7页未读,继续阅读
资源评论


weixin_38545961
- 粉丝: 5
- 资源: 963









最新资源
- springboot项目山西大同大学学生公寓管理系统boot.zip
- springboot项目社区帮扶对象管理系统.zip
- springboot项目社区待就业人员信息管理系统的设计与实现.zip
- springboot项目社区网格化管理平台的构建.zip
- springboot项目社区防疫物资申报系统.zip
- abaqus桩基础 桥墩拟静力试验 包涵实体建模、钢筋建模、材料定义、装配模型、分析步、网格划分、相互作用、载荷、计算等超详细教程(带源文件)
- springboot项目社区医疗服务系统.zip
- springboot项目社区物资交易互助平台.zip
- springboot项目社区医疗服务可视化系统.zip
- springboot项目社区疫情返乡管控系统.zip
- springboot项目社区疫情管理系统.zip
- springboot项目实习生管理系统设计和实现.zip
- COCOS经典小游戏案例,游戏引擎是COCOS,TS开发,包含2048,俄罗斯方块,飞行的小鸟,黄金矿工 4个经典的小游戏,代码工整,逻辑清晰,无论是想学习cocos还是想尝试开发小游戏都非常有帮助
- springboot项目水产养殖系统.zip
- springboot项目数字化农家乐管理平台的设计与实现.zip
- 1.Matlab实现SSA-CNN-BiLSTM麻雀算法优化卷积双向长短期记忆神经网络时间序列预测; 2.输入数据为单变量时间序列数据,即一维数据; 3.运行环境Matlab2020b及以上,data
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


