
基于基于ARM嵌入式图像处理平台的太阳跟踪系统嵌入式图像处理平台的太阳跟踪系统
本文用基于32位ARM嵌入式微控制器S3C2440来构建太阳跟踪系统,采用CMOS图像传感器来感知太阳方位,
并通过微控制器计算获取太阳跟踪误差,实现对太阳的高精度跟踪。加入视日运动规律,在跟踪目标丢失时,
对系统进行重新定位。同时,该系统的结构简单轻便,功耗低,环境适应能力强,能应用于各种太阳能设备。
0 引言
随着社会的发展和进步,环保节能已经成为人类可持续发展的必要条件。目前,再生能源的开发和利用越来越受到人们的关
注。太阳能由于其普遍、无害、无限、长久等特点,成为最绿色、最理想、最可靠的替代能源。但太阳能同时存在分散,不稳
定,效率低等特点,太阳能光伏系统为解决这一问题提供了条件。
就目前的太阳能光伏系统而言,如何最大限度提高太阳能的转换率,仍是国内外的研究热点。有研究表明,和始终朝南的固定
表面相比,与太阳辐射方向始终保持垂直的表面对太阳能的利用率提高约33%。太阳跟踪装置可以保证太阳辐射方向始终垂
直于太阳能电池板平面,使接收到的太阳辐射大大增加,提高了太阳能的接受率与利用率,因而得到广泛的应用。
太阳跟踪装置的分类方法有很多,按照跟踪方法,主要可分为视日运动跟踪和光电跟踪,视日运动跟踪又可分为单轴跟踪和双
轴跟踪。光电跟踪装置有较高灵敏度,结构简单,能通过反馈消除累积误差,具有较大优势,但受环境影响很大。其关键部件
是光电传感器,常用的是光敏电阻。由于光敏电阻安装位置不连续和环境光散射等因素的影响,系统不能连续跟踪太阳,精度
有限。视日运动跟踪能够全天候实时跟踪,但是存在累积误差。其中,单轴跟踪装置结构简单,但跟踪误差大;双轴跟踪装置
算法复杂,跟踪难度较大,但跟踪精度较高。
本文用基于32位ARM嵌入式微控制器S3C2440来构建太阳跟踪系统,采用CMOS图像传感器来感知太阳方位,并通过微控制
器计算获取太阳跟踪误差,实现对太阳的高精度跟踪。加入视日运动规律,在跟踪目标丢失时,对系统进行重新定位。同时,
该系统的结构简单轻便,功耗低,环境适应能力强,能应用于各种太阳能设备。
1 硬件设计
1.1 系统硬件结构
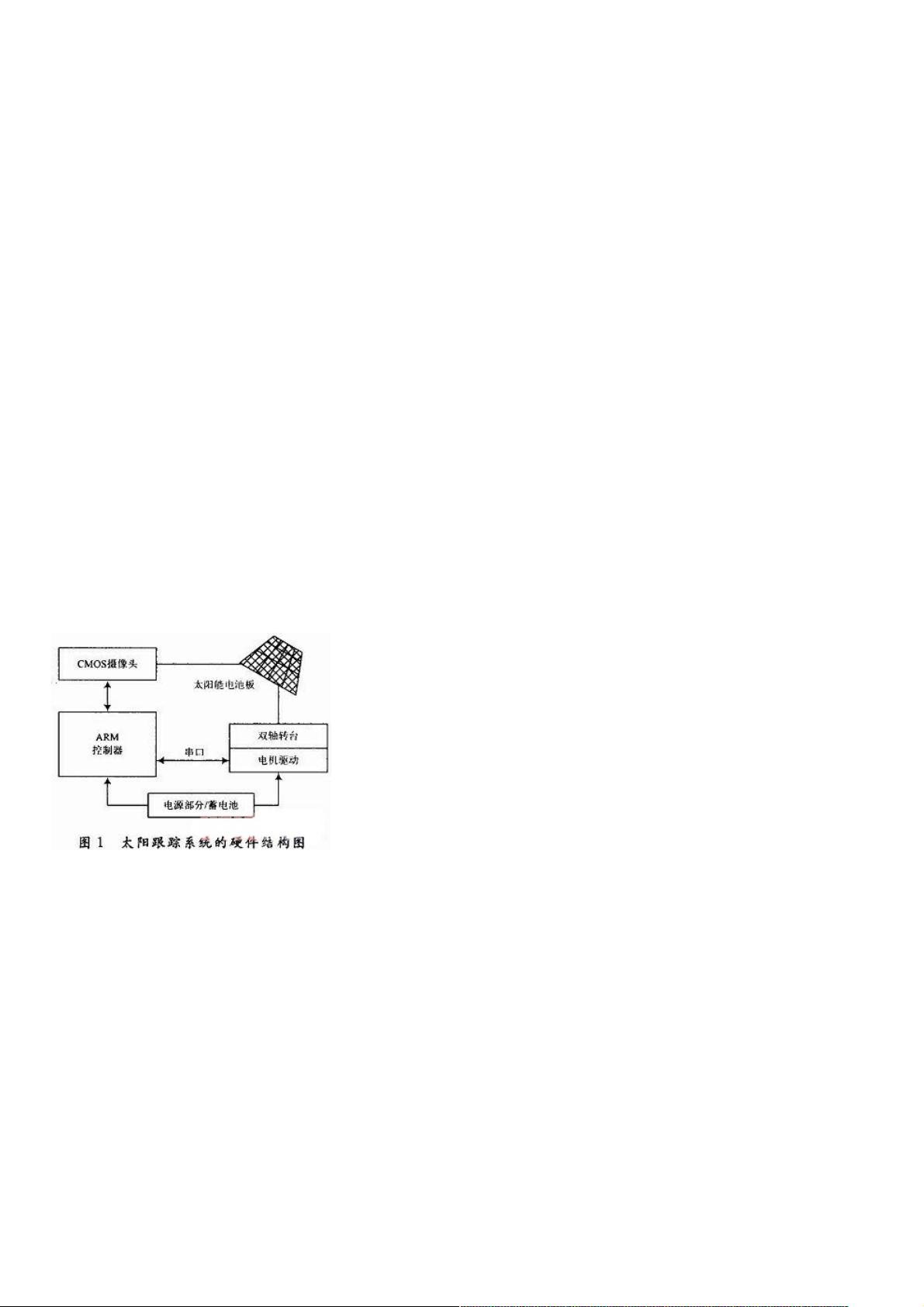
系统以ARM微控制器作为主控制器,采用CMOS图像传感器采集图像,并利用双轴转台来支撑太阳能电池板。其中双轴转台
集成了电机驱动与控制部分,通过串口与主控制器进行通信。
如图1所示是太阳跟踪系统的硬件结构图。在图1中,CMOS图像传感器与太阳能电池板处在同一平面,并固连在双轴转台
上;ARM处理器与双轴转台的电机驱动部分采用串口通信方式;系统的供电均由蓄电池支持(包括ARM控制板和转台),因而
形成了一个独立系统。系统的基本工作原理是:根据视日运动规律或CMOS图像传感器采集的天空图像,利用ARM处理器求
取系统跟踪控制参数,并通过串口来控制双轴转台的转动。
1.2 硬件介绍
(1)ARM微控制器。从实用角度考虑,太阳跟踪系统的低功耗设计显得尤为重要,ARM微处理器在保证高性能的前提下能够尽
量降低功耗。相对于PC机,ARM微处理器占用空间较小,质量轻,可靠性强,硬件资源丰富,在简化系统结构的同时为系统
功能扩展提供了可能。系统选用32位ARM嵌入式微控制器S3C2440来构建控制平台。运用ARM微控制器构建的嵌入式图像处
理平台大大提高了图像的处理速度,同时有效降低了系统成本。图像处理系统还具有拆装方便,配置灵活等优点,安全性得到
大大提高。
资源评论


weixin_38535848
- 粉丝: 8
- 资源: 926









最新资源
- postgresql-10.23.tar.gz
- IOS源码IOS应用源码之方方引擎开源框架
- postgresql-11.22.tar.bz2
- 永磁同步电机直接公式法计算,它是将MTPA和弱磁结合起来应用,弱磁方法选择的是公式法(直接计算法) 包括直接法弱磁控制基本原理、实现方法及仿真 最最重要的提供从内环到外环电流环的仿真步骤,各个参数
- 这是一个faster-rcnn的pytorch实现的库,可以利用voc数据集格式的数据进行训练 .zip
- 机械设计自动模切机sw16可编辑非常好的设计图纸100%好用.zip
- standford 吴恩达老师 机器学习的笔记
- postgresql-12.22.tar.bz2
- postgresql-12.22.tar.gz
- IOS源码IOS应用源码之房贷计算器改进
- postgresql-13.18.tar.bz2
- 这是一个yolov7的库,可以用于训练自己的数据集 .zip
- simpack与abaqus联合仿真,包括柔性钢轨建模,fbi文件生成,钢弹簧浮置板搭建,轨道不平顺激励等,包括模型
- 机械设计自动套筷子机sw18可编辑非常好的设计图纸100%好用.zip
- postgresql-13.18.tar.gz
- 城市高楼卡通儿童教育教学课件模板.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


