
第
40
卷第
10
期
2007
年
10
月
天津大学学报
Joumal
of
Tianjin University
Vo
l. 40
No.
lO
Oc
t.
2007
可重构混联机械手模块
Tricept
与
TriVariant
的
误差建模与性能比较
洪振宇
1
,
2
(
1
天津大学机械工程学院,天津
300072;
2.
中国民航大学交通工程学院,天津
3003
∞)
摘
要:对于少自由度并联构型装备,必须通过误差建模将影响末端可控和不可控误差的几何误差源进行分离,从而
指导机构的精度设计和运动学标定-以
5
自由度混联机械手模块
Tricept
和
TriVariant
为对象,研究了一种少自由度并
联构型装备的误差建模方法-该方法可有效分离出影响末端不可控误差的几何误差源,从而得到仅需控制恰约束支链
的制造和装自己误差,有效抑制未端的不可控姿态误差-研究结果表明,对于等同的任务空间和相同的尺度参数,两机械
手具有相近的精度性能
关键词:并联构型装备;误差建模;不可控误差
中固分类号
THl12
文献标志码
A
文章编号
0493-2137
(200
7)
10-1176-07
Error
Modeling
and
Performance Comparison
of
3-DOF Modules
of
Two Reconfigurable
PKM
--the
Tricept
and
the
TriVariant
1, 2
HONG
Zhen-Yll
(
1.
School
of
Mechanical Engineering , Tianjin University , Tianjin 300072, China;
2.
School
ofTransportation Engineering,
Civil
Aviation
University
of
China, Tianjin 300300, China)
Abstract:
For
由巳
sllb-6-degree
of
freedom (
DOF)
parallel kinematic machines
(PKM)
, it
is
necessary
to
separate
the geometric error sources which influence the compensable and uncompensable errors
of
the mobile
platfo
口
n
by
error modeling
, so as to supervise the accuracy
d
巳
sign
and kinematics calibration. By taking two 5-DOF hybrid robots,
the Tricept and the TriVariant, as an example, an error
mod
巳
ling
approach was presented for the sub-6-DOF PKM.
This approach can be used to identify the geometric error sources affecting the uncompensable position and orientation
errors
of
由巳
mobile
platfo
口
n.
It
is concluded that the uncompensable
eπors
of
the mobile
platform
缸
e
primarily
dorninated
by
由巳
manufactllring
and assembling errors
of
the proper-constraint limb.
It
shows that the TriVariant robot
and the Tricept robot have sirnilar accuracy provided identical task workspace and dimensional
pararn
巳
ters
Keywords
: parallel kinematic machines
(PKM);
巳
πor
modeling; uncompensable errors
并联构型装备(
parallel
kinematic
machine
,
PKM
)
泛指以并联机构作为主进给机构的机床或机械手系
统.精度是这类装备的重要技术指标,也是能否投人
工业运行的关键
.PKM
的自身误差可分为准静态误差
收稿日期
2
∞
7-03-16;
修回日期:
2007-06-14.
作者简介:洪振宇(
1978
一
),男,博士研究生
通讯作者·洪振宇,
app1e_hzy@hotmai
l.
com
和动态误差.前者主要包括几何误差以及由钱链间
隙、伺服控制、稳态切削载荷、热变形等引起的误
差.几何误差是
PKM
准静态误差的主要来源,包括零
部件的制造与装配误差
[1-2]
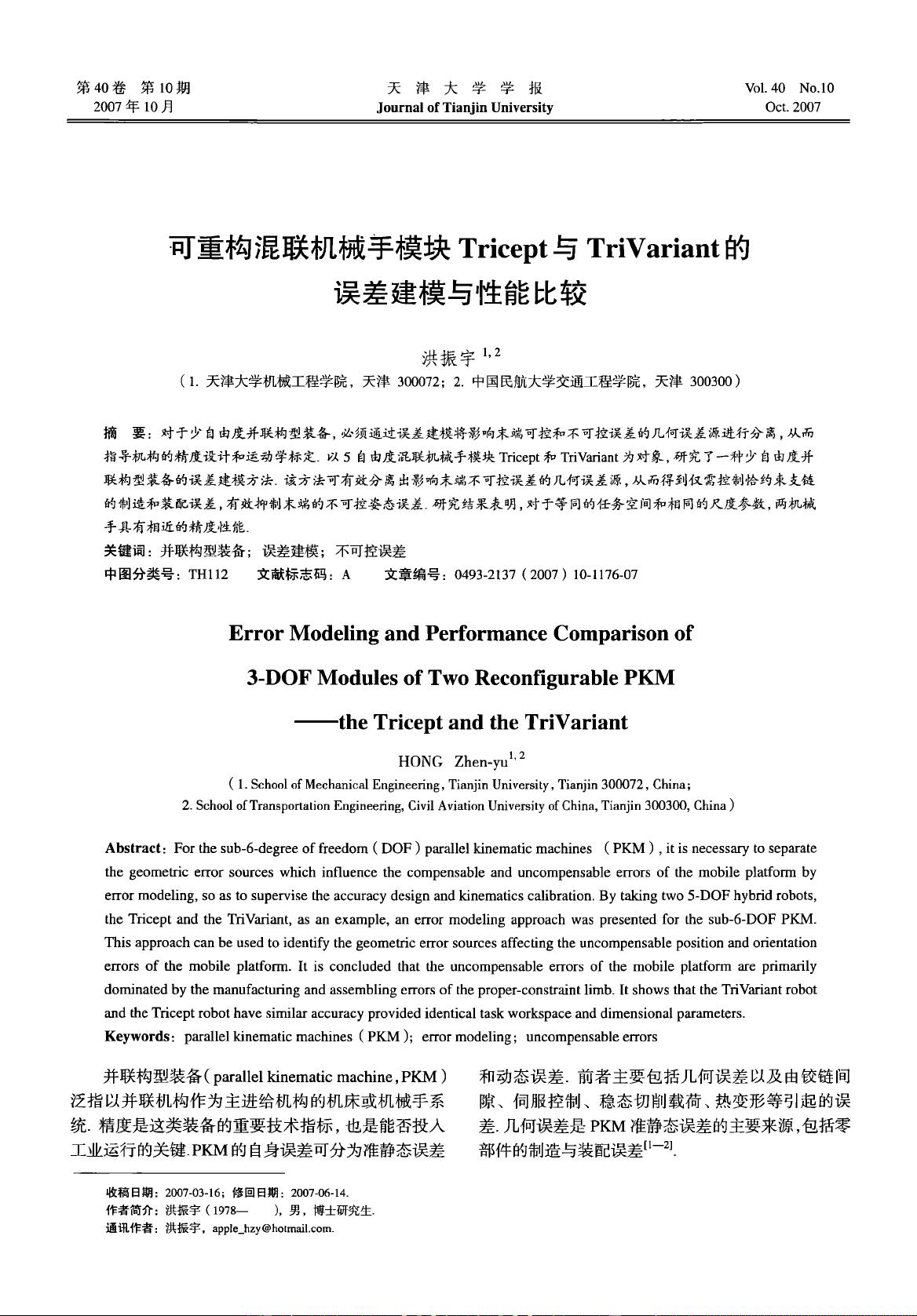
剩余6页未读,继续阅读
资源评论


weixin_38517892
- 粉丝: 3
- 资源: 950











