Full Autonomous Quadcopter for Indoor 3D Reconstruction*
Gerold Huber
1
, Markus Ikeda
1
, Michael Hofmann
1
, Christoph Heindl
1
, Andreas Pichler
1
Abstract— This paper presents system architecture, model-
ing, control and experimental results of a fully autonomous
unmanned aerial vehicle (UAV). Standard autopilot systems rely
on external references for navigation. Outdoor systems often
utilize (differential) global position systems (GPS), while indoor
systems rely on indoor tracking systems. A low-cost depth
camera and a reconstruction software enable the discussed
system to navigate autonomously without external sensors
or markers. Inflight data acquisition is not only used for
navigation, but also for reconstruction of a 3D surface model
of an arbitrary object in real time. This project builds on
the open source autopilot project PX4FMU as well as on the
reconstruction software RECONSTRUCTME by PROFACTOR.
Experimental results illustrate the approach.
I. INTRODUCTION AND MOTIVATION
A fully autonomous drone is useful in many different ap-
plication scenarios (e.g. autonomous map acquisition in un-
known terrain or disaster scenarios,...). While many projects
make use of GPS for outdoor tracking or motion tracking
systems ([1],[2]) for indoor tracking, the aim of this project
was to work without external sensors, cameras or markers
in order to be independent of the surrounding environment.
However, this invokes position estimation being the main
challenge.
In order to overcome the problem of unstable integration
of noisy acceleration or velocity measurements, raw data
from a depth camera sensor is used for position estimation as
well as online reconstruction of the environment. As a first
application scenario for laboratory demonstration, the task
of creating 3D scans (using the reconstruction software RE-
CONSTRUCTME by PROFACTOR) fully autonomously was
chosen. This is especially interesting for scanning large
objects where manual sensor guidance is inconvenient or
impossible.
The multicopter system is capable of carrying up to 1 kg
payload (including sensors etc.). Due to economic reasons,
a so called quadcopter setup (four propeller version multi-
copter) was chosen since it is the most common and tested
platform and requires less components than a system with
six or more motors.
II. MODEL DERIVATION
For testing control algorithms on disturbance reliability
etc., a dynamic model is required.
A. Propulsion Group
The propulsion group consists of an electronic speed
controller (ESC), the motor and the propeller. The ESC
expects a pulse width modulated (PWM) signal from the
1
PROFACTOR GmbH http://www.profactor.at
angular velocity ω [rpm]
Momentum [Nm]
ω
2
regression
ω
2.5
regression
measurements
angular velocity ω [rpm]
Thrust [N]
linear regression
measurements
PWM input signal u [µs]
ω [rpm]
1000 2000 3000 4000
5000
6000 7000 8000
1000 2000 3000 4000 5000 6000 7000 8000
1000 1100 1200 1300 1400
1500
1600 1700 1800 1900 2000
0
0.1
0.2
0
5
10
15
0
5000
10000
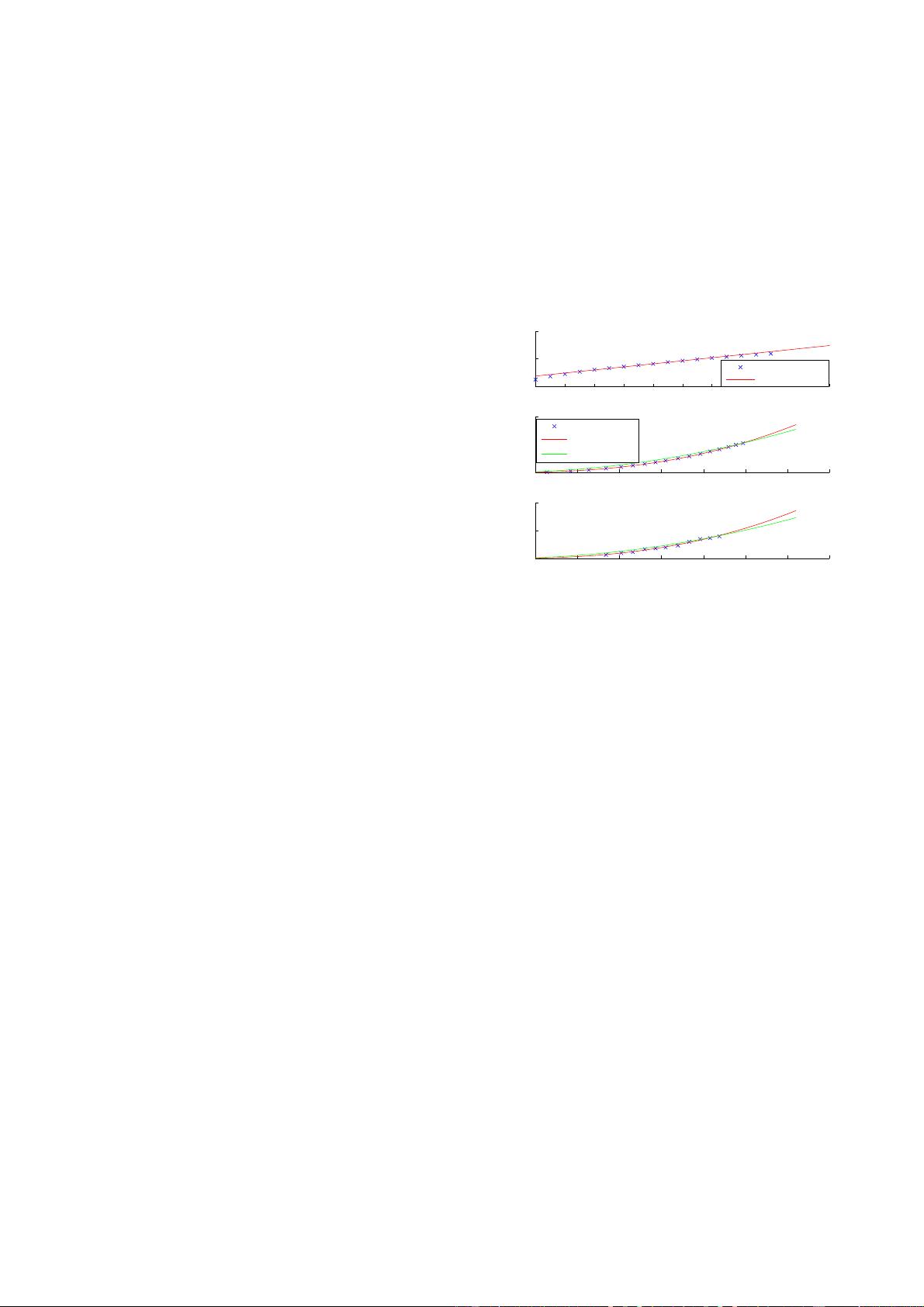
Fig. 1: Regression of the propulsion group measurements
microcontroller and controls the motor’s rotational velocity.
The forces that are created by this group, are the only control
inputs present in the system. The propellers invoke two main
forces due to the airflow:
a) a thrust force in direction of the rotation axis
b) a resistance torque against the rotation
Second order aerodynamic effects such as the ground effect
or rotor flapping are neglected due to the small rotor diameter
(see [3],[4]). A compensation of the imposed torque in
steady flight is achieved by using pairs of clockwise and
counterclockwise rotating propellers. Figure 1 shows the
measurements of the angular velocity (ω) over the PWM
input signal (top), which seem to be related fairly linear
ω = k
pwm
u
pwm
+ d
pwm
(1)
and the relation of thrust force a) (middle) and the resistance
torque b) (bottom) over angular velocity. Literature suggests
([4],[5]), that the resulting thrust force and resistance moment
are proportional to ω
2
. However, measurements show that
an assumption of proportionalities to ω
2.5
lead to a better
regression
F
thrust
= k
F
ω
2.5
M
res
= k
M
ω
2.5
.
(2)
Measurements were taken using a 12.6 V power supply,
which corresponds to the fully charged 3 cell battery pack.
Further experiments on the relation of PWM input signal
to angular velocity (Fig. 2) show the big impact of the
inevitable voltage loss of the battery, due to energy con-
sumption during flight. Yet, for the linear regression (1)
experiments show that mainly the offset d
pwm
is changing.